科学,技术,工程和数学领域的师生
无处不在的计量学
质量
重力加速度在香港、赤道和南北两极的故事

标准及校正实验所
质量及力学实验室
梁伟文、赵军略
A. 牛顿的万有引力定律、万有引力常数(big G)和重力加速度(little g)
如你读过物理的话,你应该会知道艾硕牛顿提出行星和行星之间、月球和地球之间,以至树上掉下来的苹果,全部都受由他提出的「万有引力定律」主宰。这个定律主张两个质量之间的吸引力,是两者质量的积除以彼此距离的二次方,再乘以万有引力常数G。这道数式可显示如下︰
 (1)
(1)
万有引力常数G在英语中时常被称为「Big G」,但它的数值是非常小,约为6.674 3 x 10-11 m3 kg-1 s-2,反映万有引力比电磁力薄弱得多。以雪柜上贴着的磁石纪念贴为例,整个地球的质量释出的万有引力,其实也比不过那块磁石对雪柜门所产生的磁力呢!
万有引力常数「Big G」 与重力加速度「Little g」很容易令人混淆。重力加速度是指物体受地球的引力场影响而出现的运动加速度,根据牛顿运动第二定律,这股力量可显示为算式(2)当中的mg,m即是物体的质量。
 (2)
(2)
B. 引力加速度对计量学非常重要的原因
二十世纪前,测量重力加速度的主要目的是为了认识地球的形状和了解地壳表面的质量分布。其后,测量重力加速度不单受大地测量师重视,对计量学家来说,测量重力加速度对力学、扭力和压力亦尤其重要,这些测量利用已知质量在重力加速度下产生的重力作仪器校正。
B.1 产生已知力
就校正载荷感测器等力学测量仪器而言,力标准装置是最准确的测量工具。在国际单位制中,力的单位是牛顿(N),力标准装置产生的力(F)可从下列数式得出︰
 (3)
(3)


在数式中,m是所施加砝码的质量,g是引力产生的重力加速度,ρm 和 ρa 则分别是砝码和环境空气的密度,而空气密度ρa的数值只要使用由气压、温度和湿度的函数表示的近似公式进行运算便可得出[1][2]。
B.2 产生已知扭力
与测量力学相似,扭矩标准装置是最能准确校正扭力感测器等扭力测量仪器的工具。
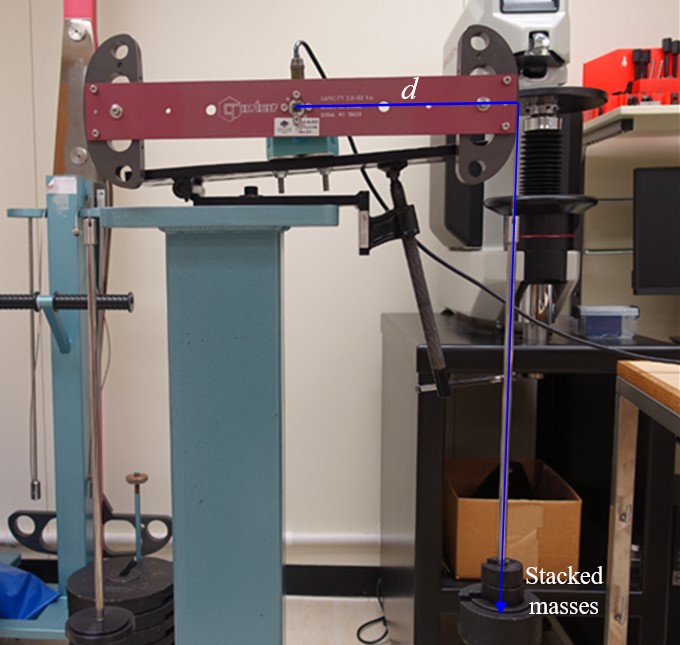 图2 在标准及校正实验所的扭矩标准装置
图2 在标准及校正实验所的扭矩标准装置
在国际单位制中,扭力的单位是牛顿米(N.m),扭矩标准装置产生的扭力(T)可从下列数式得出︰
 (4)
(4)
在数式中,m是所施加砝码的质量,g是引力产生的重力加速度,d是扭矩轴中心和施加砝码之间的距离。
B.3 产生已知压力
气体或液体活塞压力计标准装置都是测量压力的常用标准,其运作原理是透过在精密活塞装置的有效面积上施加已知质量的砝码所产生的力来计算工作介质的压力。


活塞压力计标准装置所产生的压力P可从下列数式得出︰
 (5)
(5)
在数式中,m是所施加砝码的质量,g是引力产生的重力加速度,ρa 和 ρm 分别是环境空气和砝码的密度,A0 是处于零压力下的有效面积,a是活塞有效面积的失真系数,Pn 是等于mg/A0 的基本压力, αp 和 αc 分别是活塞和汽缸的物料每摄氏度的线性热膨胀系数,而t 则是活塞的温度。
C. 运用物理学估算g的数值
C.1. 基础物理学中的g
要计算地球表面的g数值,看起来只需直接运用算式(1)和(2)即可。以一个苹果为例,假设m1等于地球的质量(M ≈ 5.972 19 x 1024 kg),m2是苹果的质量,r是苹果与地心之间的距离,我们会得出︰
 (6)
(6)
惟地球并非一个正圆球体,而是呈扁椭型的球体,因此r的数值在赤道会较南北两极的半径数值为大。从事地质测量学的科学家通常以椭球体代表地球的形状,而其中广为采用的椭球参数是WGS-84坐标系。虽然本文不会详细说明WGS-84,但我们亦可把WGS-84的数据代入数式(6),看看在赤道、北极和本港标准及校正实验所力学实验室的g数值分别为何。结果列于表1。
不过,这些估值准确吗?
| 位置 | 北极 | 赤道 | 香港 (力学实验室) |
|---|---|---|---|
| 纬度 λ(度) | 90 | 0 | 22.314 84 |
| 与地心(WGS-84椭球参数)的距离(米) | 6 356 752.314 | 6 378 137 | 6 375 076 |
运用 得出的g数值 得出的g数值 |
9.864 36 | 9.798 32 | 9.807 73 |
估算的g数值
C.2. 国际重力公式
从事地质测量的人员时常会运用国际重力公式,用来计算某纬度为λ的位置的理论重力。这道公式能够相当准确地估算出地球上不同地方的g数值。下列版本的公式是由Aziz 于2010年提出[3]︰
 (7)
(7)
运用国际重力公式,便能得出赤道、北极和力学实验室的g数值,结果载于表2。表1和表2的计算结果迥异,就北极所得出的数值相差达0.33%,原因是什么呢?
| 位置 | 北极 | 赤道 | 香港 (力学实验室) |
|---|---|---|---|
| 纬度 λ(度) | 90 | 0 | 22.314 84 |
| 运用国际重力公式得出的g数值 | 9.832 19 | 9.780 33 | 9.787 78 |
C.3. 影响g数值的其他因素
在推算数式(6)的过程涉及若干假设,其一是忽略地球自转的影响,其二是假设两个质量均为点质量。稍后让我们看看这些因素对g数值有什么影响。
C.4. 地球自转对g的影响
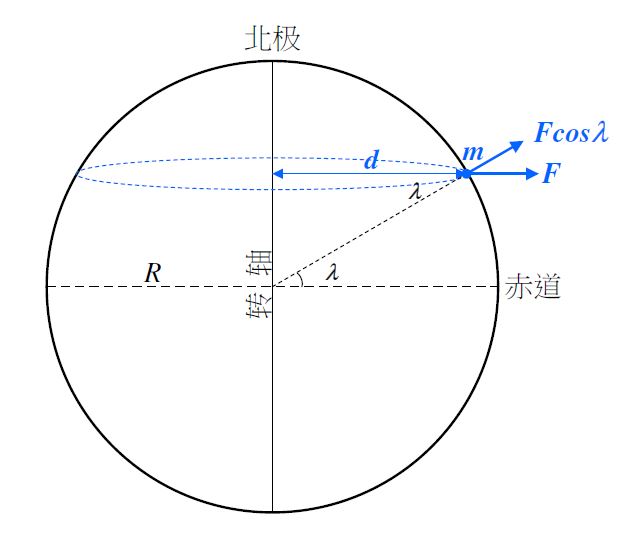
地球自转对物体产生离心力,而离心力的强度取决于该物体的质量(m)、地球自转速度(ω)的二次方,以及该物体与地球自转轴的距离(d)︰
 (8)
(8)
就处于纬度λ的物体而言,d等于r cos λ,r是该物体与地心之间的距离。离心力(F)属外向力,并与自转轴形成直角,而F与引力相对的组成部分为F cos λ。因此,引力对应地球自转应按F cos λ的因子或者是 mrω2cos2λ减少,而 rω2cos2λ 则为g相应减少的数值,地球自转速度ω值为7.292 115 x 10-5 rad s-1。
表3是表1的数据经修正后的结果。由此可见,地球自转并不足以解释表1和表2的结果之间的差异。
| 位置 | 北极 | 赤道 | 香港 (力学实验室) |
|---|---|---|---|
| 纬度 λ(度) | 90 | 0 | 22.314 84 |
| 与地心(WGS-84椭球参数)的距离(米) | 6 356 752.314 | 6 378 137 | 6 375 076 |
| (A) 运用得出的g数值 |
9.864 36 | 9.798 32 | 9.807 73 |
| (B) rω2cos2λ. (因地球自转产生离心加速度的修正) |
0.000 00 | -0.033 92 | -0.029 01 |
| (A) + (B) | 9.864 36 | 9.764 41 | 9.778 72 |
C.5 因地球并非正圆球体而产生的影响
严格来说,数式(1)只适用于两个质量点之间的情况。由于地球的质量并非集中于中心的某一点,因此数式(6)的结果仅为近似值。
假如一个物体的质量分布于某体积内,便可运用数式(1)计算该体积内所有质量的影响总和,从而得出在P点因该物体而产生的引力场。计算总和的过程涉及运用繁复微积分来解开拉普拉斯方程(Laplace Equation)和泊松方程(Poisson Equation),这两道方程会在「附加说明」部分另作简述,本部分只会论述相关结果。由于地球并非正圆球体,引力场涉及另一个根据纬度λ的程式项,这个程式项有时被称为地球引力场的次级方程项,而其对g的影响表达如下:
 (9)
(9)
在数式中,J2是地球椭圆率的量度、M是地球的质量,而a是赤道半径。J2采用大地测量参考系统的通用值为1.08263 x 10-3。我们把这次级方程项加入表3以得来获得表4的计算结果,便会发现所得计算结果与国际重力公式的计算结果相当一致。
| 位置 | 北极 | 赤道 | 香港 (力学实验室) |
|---|---|---|---|
| 纬度 λ(度) | 90 | 0 | 22.314 84 |
| 与地心(WGS-84椭球参数)的距离(米) | 6 356 752.314 | 6 378 137 | 6 375 076 |
| (A) 由计算出的g数值 |
9.864 36 | 9.798 32 | 9.807 73 |
| (B) 因应地球自转的离心加速度而作出的修正 | 0.000 00 | -0.033 92 | -0.029 01 |
| (C) 次级方程项 | -0.032 25 | 0.015 91 | 0.009 05 |
| (A) + (B) + (C) | 9.832 10 | 9.780 32 | 9.787 77 |
本部分适合高阶程度的读者,一般读者可省略不看。下文会透过微积分解释地球引力场的多极展开式。
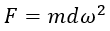
假如一个物体的质量分布于某体积(V)内,便可运用数式(1)计算该体积内所有质量(dM)的影响总和,从而得出在P点因该物体而产生的引力场。在这类问题中,先解开属于非向量的引力势(U(P))会较为容易。在P点因质量dM而产生的引力势,可由GdM/q计算得出。在P点的总势能如下:
 (10)
(10)
有一道广为人知的数学公式说明了1/q与r、s和cosθ的关系,当中应用了著名的勒让德多项式,包括P0(X) = 1、P1(X) = X,以及P2(X) = (3X2-1)/2等。
 (11)
(11)
展开后便可得出:
 (12)
(12)
运用上述数式后,U(P)可展开为:
 (13)
(13)
数式(13)右边第一个项是初级方程项,进行积分后会变成-GM/r。就U(P)相对于空间坐标(r)进行微分后,便可得出重力加速度(GM/r2),这正正与针对两个点质量的牛顿引力定律一模一样。如果物体为均匀球体,在多极展开式中只有初级方程项并非零。
第二个项是次级方程项。如果物体的质量中心被选定为原点(O),次级方程项即为零。
第三个项是三级方程项(在多极展开式中此项亦会被称为四极距)。由于地球不是正圆球体,而是两极扁平的扁椭圆球体,因此三级方程项并非零,其数值可在进行积分后按下列数式计算得出,并视乎r的方向而定。
 (14)
(14)
其中A、B、C和I分别是围绕x、y和z轴及方向r的转动惯量。假设地球的质量围绕转轴对称分布,则A = B ≠ C,而I = A + (C-A) cos2θ。在大地测量学中,(C-A)通常会以J2Ma2表示,其中M是地球的质量,而a是赤道半径。最后,适用于地球的数式(13)可简化为下列数式:
 (15)
(15)
多极展开式还包括其他高阶方程项(例如四级方程项和五级方程项等),惟其数值对地球的影响可忽略不计。
就U(P)相对于r进行微分后,便可得出以下的重力加速度:
 (16)
(16)
在地球上,θ是余纬度并相等于(90°-λ),其中λ是纬度。若以纬度表示数式(16),便可得出:
 (16)
(16)
C.6 总论
总括来说,以下数式能有效估算在纬度λ的重力加速度g,准确度约为10-3。
 (17)
(17)
然而,对计量学的应用来说,该准确度并不足够。g在某地点的实际数值,还取决于高度、地形、岩石密度、以及该地点周围的地幔和地壳的不均匀性。为取得适合计量学应用的准确度,g的数值必须以重力仪测量进行实地测量。
D. 标准及校正实验所在1990年以相对重力仪测量重力加速度
1990年7月,英国地质调查所(BGS)受前土木工程署辖下的土力工程处委托,在中国香港和隶属前工业署的标准及校正实验所展开一项关于引力的大型调查[4][5]。
英国地质调查所在1990年进行有关调查时,采用了属于相对重力仪的拉–罗氏G型重力仪,其读数准确度最高达1 x 10-7 米/平方秒。当时,这种重力仪是1971年国际重力标准网(IGSN71)所采用的主要仪器,而该标准网属于全球性网络,亦是绝对重力测量的参考标准框架[6]。
中国香港在1970年代共设有十个IGSN71基站,直至1990年仅余三个。英国地质调查所在1990年进行有关调查,重新确认余下三个基站的一致性,并设立四个新基站。调查期间,英国地质调查所在全港18个不同地点(例如在香港岛香港大学的科学馆、九龙李郑屋汉墓的入口、大屿山的梅窝警署,以及新界大帽山的三角测量站等),进行共71 次重力观测,测量所得的重力加速度介乎9.785 398 5 米/平方秒至9.787 624 9 米/平方秒。
1990年7月5日和6日,英国地质调查所分别在标准及校正实验所辖下位于九龙湾分所的力学实验室和位于湾仔入境事务大楼总所的质量实验所,进行实地重力测量工作。由英国地质调查所提供测量所得的重力加速度摘录于表5,测量的不确定度为5 x 10-7米/平方秒。
| 地点 | ||
|---|---|---|
| 九龙湾力学实验室 地下 |
湾仔入境事务大楼35楼 质量实验室 |
|
| 测量所得的重力加速度(米/平方秒) | 9.787 601 5 | 9.787 234 6 |
E. 标准及校正实验所在2019年以绝对和相对重力仪测量重力加速度
标准及校正实验所沿用了英国地质调查所所提供的重力数值超过25年。随着分所和总所周围的环境经历种种变迁,加上技术评审专家提出建议,标准及校正实验所认为重新测量重力数值实属必要,遂于2019年2月委托数位来自中国计量科学研究院(NIM)的专家,前往位于九龙湾的力学实验室和位于湾仔的质量实验所、振动实验所和压力实验所,对重力加速度进行实地测量。
力学实验室设置了由中国计量科学研究院研发的NIM-3A型[7]高精度绝对重力仪。该重力仪所测量的重力数值会作为参照基准,其运作原理是在真空管内掉下一个物体,然后以激光干涉仪测量该物体掉落一段指定距离所需的时间[8][9]。接受测试的质量的加速度可根据测定的掉落轨迹直接计算得出,然后以相对重力仪测量在质量实验所、振动实验所和压力实验所的重力数值。
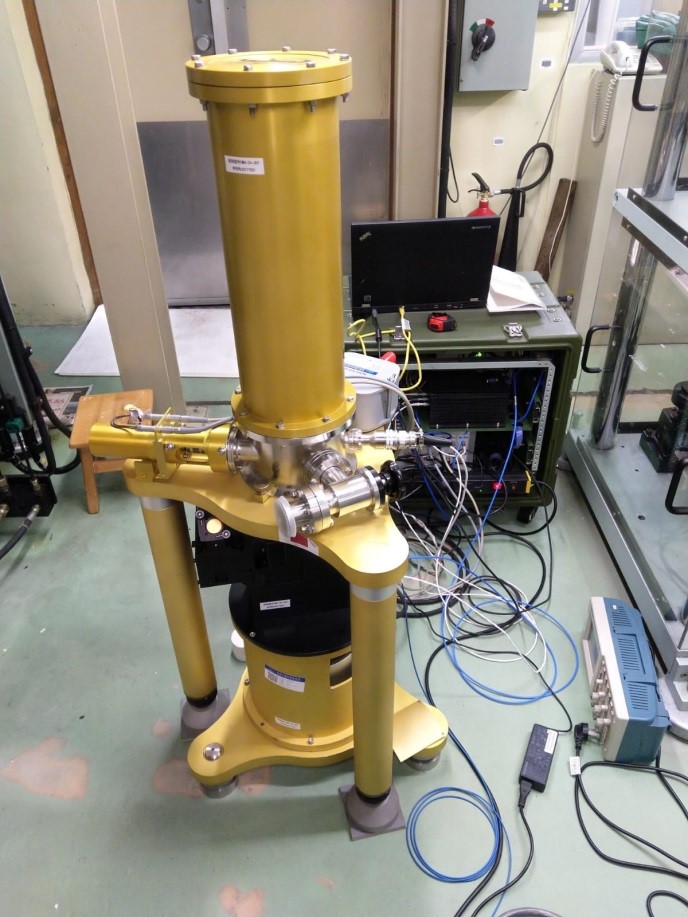
图4 用于测量在力学实验室的重力加速度的绝对重力仪

图5 用于测量在质量实验室、振动实验室和压力实验室的重力加速度的相对重力仪
中国计量科学研究院专家测量所得的重力加速度摘录于下表,测量的不确定度在5 x 10-7 米/平方秒之内。
| 地点 | ||
|---|---|---|
| 九龙湾力学实验室 地下 |
湾仔入境事务大楼35楼 质量实验室 |
|
| 测量所得的重力加速度(米/平方秒) | 9.787 600 5 | 9.787 235 2 |
F. 对比g在力学实验室实地测量的数值与理论上的估算值
对比g的实地测量数值与理论上的估算值,结果相当有趣,有关数据载于表7。我们观察到,从数式(6)计算得出的数值与2019年在力学实验室实地测量的数值相差0.21 %。考虑到因地球自转,以及其并非正圆球体而产生偏差等因素而作出修正后,有关偏差减至0.002 %。
| 香港 (力学实验室) |
|
|---|---|
| 运用数式(6)由计算得出的g数值 |
9.807 73 |
| 运用数式(17)由计算得出,并因应地球自转和四极矩而作出修正后的g数值 |
9.787 77 |
| 运用数式(7)由国际重力公式计算得出的g数值 | 9.787 78 |
| 英国地质调查所专家在1990年实地测量的数值 | 9.787 601 5 |
| 中国计量科学研究院专家在2019年实地测量的数值 | 9.787 600 5 |
牛顿的万有引力定律适用于所有物体。不过,推算数式(6)的过程涉及若干假设,其一是假设两个质量均为点质量,即代表其几何尺寸并不重要。此外,地球是扁椭圆球体而非正圆球体,密度并不均匀,质量分布也不一致,并会持续自转。另外,g的数值会随着高度的增加而按每米3.086 x 10-6的比率(约每米-0.000 031 5%)下降。上述所有因素均可用来解释g的测量数值与估算值之间的偏差。
参考资料:
- Davis, R.S., “Equation for the determination of the density of moist air” (1981/91), Metrologia 29, 67 (1992).
- Giacomo, P., “Equation for the determination of the density of moist air” (1981), Metrologia 18, 33 (1982).
- Aziz, N., Majid, B. and Jorg, E. (2010), “Gravity and Magnetic Data Acquisition Over a Segment of the More-Trondelag Fault Complex”, NGU Report 2010.049.
- EVANS R B (1990). Hong Kong gravity observations in July 1990 with BGS Lacoste and Romberg meter No. G97 and international connections to IGSN 71. British Geological Survey Technical Report WK/90/24R.
- Busby, J.P., Evans, R.B., Lam, M.S., Ridley Thomas, W.N. & Langford, R.L. 1992. The gravity base station network and regional gravity survey of Hong Kong. Geological Society of Hong Kong Newsletter, Vol. 10, pp 2 - 5.
- C. Morelli, C. Gantar, T. Honkasalo, R.K. McConnell, J.G. Tanner, B. Szabo, U. Uotila, C.T. Whalen, The International Gravity Standardization Net 1971. Special Publication No 4 of the International Association of Geodesy, 1974.
- Wu Shu-qing, Feng Jin-yang, Li Chun-jian, Su Duo-wu, Wang Qi-yu and all the participants, CCM.G-K2.2017 CIPM Key Comparison of Absolute Gravimeters, Metrologia, Volume 57. Number 1A (2020).
- Li Chun-jian, Xu Jin-yi, Feng Jin-yang, Su Duo-wu, Wu Shu-qing, Correction of NIM-3A absolute gravimeter for self-attraction effect. Ninth International Symposium on Precision Engineering Measurement and Instrumentation, 2015
- Shuqing Wu, Tianchu Li. Technical Development of Absolute Gravimeter: Laser Interferometry and Atom Interferometry[J]. Acta Optica Sinica, 2021, 41(1): 0102002(in chinese)吴书清, 李天初. 绝对重力仪的技术发展: 光学干涉和原子干涉[J]. 光学学报, 2021, 41(1): 0102002
光学及辐射度
智能电话能否作测光之用?

标准及校正实验所
光度及辐射度实验所
李河堂 林凯珊
1). 引言
智能电话内置各式各样的感应器,为电话系统提供不同的功能。电话程式开发者亦在研发的过程中注入创意元素,利用这些内置感应器开发出各种新颖有趣的流动应用程式。测光表应用程式就是其中一种用于摄影或照明设计的流动应用程式,声称能利用智能电话提供简易、方便的光照度测量。市面上有多款测光表应用程式,但这些程式能否准确测量光照度?或者说,它们测量的物理量,是否正是光照度呢?
测光表用于测量光照度,而光照度是指每单位面积接收到的光通量(lm/m2) [4]。光照度的物理表达式为

其中Ev是光照度,A是探测器所涵盖的测量面积,而Φv则是在面积A所接收到的光通量。光照度的国际单位制(SI)单位是勒克斯(lux, 符号为lx),因此测光表又通称为光照度计/勒克斯计。
光通量(单位:流明(lumen, 符号为lm))是光度学的量,为光源输出的总光量,与正常人眼睛对不同波长辐射的感光度相关。在一般情况下,光源于球面范围S1和球面范围S2(见图F1)内的总光通量相同。一个涵盖测量面积A的探测器在两个不同距离r1和r2的位置上所接收到的光通量,会按照总光通量的 比率(即
比率(即 )而有所不同。因此,光照度会遵从著名的平方反比定律,与1/r2成正比:
)而有所不同。因此,光照度会遵从著名的平方反比定律,与1/r2成正比:

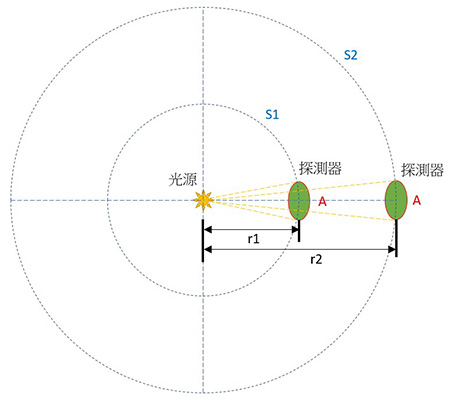 图F1. 应用于光照度的平方反比定律。A是探测器所涵盖的测量面积。
图F1. 应用于光照度的平方反比定律。A是探测器所涵盖的测量面积。
2). 传统测光表
测光表是光度学上测量光照度的工具。光照度的SI单位为勒克斯(符号:lx),即等于每单位面积接收到的光通量(lm/m2)。照度计的传统设计载于图1,它有三个主要组件,分别是一个余弦散光器、一个光度函数滤光镜(或称V(λ)滤光镜),以及一个光电二极体。
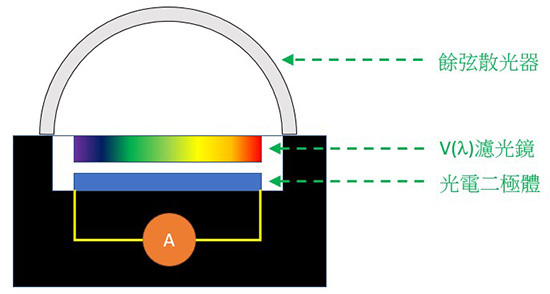 图1. 测光表的主要组件
图1. 测光表的主要组件
测量光照度时,光照强度遵从朗伯余弦定律(见图2),与光源入射角的余弦成正比。一般来说,外来光线并非全部垂直照入目标区域。余弦散光器是根据不同入射角度为光照度测量作出余弦修正的组件。以图3所示的房间环境为例,人对房间「表观亮度」的感知,会受到多重光源及从不同角度而来的环境反射光所影响。因此,余弦散光器会以不同角度收集光线,以模拟眼睛对四周环境的反应。
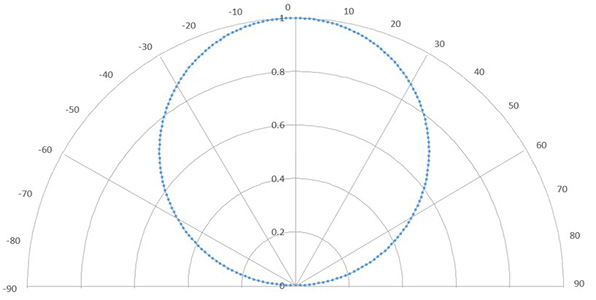 图2. 朗伯余弦定律
图2. 朗伯余弦定律
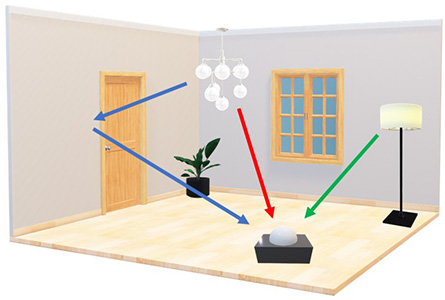 图3. 房间环境的光照度
图3. 房间环境的光照度
V(λ)滤光镜是一个带通滤光镜,在可见光谱中具有不同的光谱透射比,特别为配合光电二极体的电气特性而设,以提供与图4所示人眼明视觉响应的光谱光视效率函数(或称V(λ)函数)匹配的整体相对光谱响应度[1]。人的视觉只能看见可见光谱(波长约介乎约380纳米至780纳米之间[1]),并对「绿色」(波长约555纳米)最为敏感,对蓝光和红光波长区域的敏感度较低,而对紫外光和红外光则没有反应。不过,硅探测器等光电二极体能对包括可见光谱、紫外光以至红外光范围的广阔光谱作出反应。因此,V(λ)滤光镜旨在阻隔紫外光和红外光,并提供与人眼的V(λ)函数匹配的整体光谱响应度。测光表中的光电二极体会汇聚所有属可见光谱范围内的光线,然后产生以安培(A)为单位的输出电流,其数值与勒克斯值成正比。当我们得知光电二极体的光照度响应度(A/lx)后,便可测量光照度的数值。
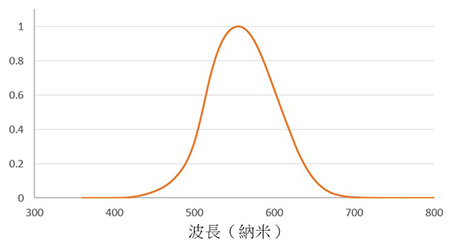 图4. 人眼的光视效率(V(λ))函数
图4. 人眼的光视效率(V(λ))函数
光透射比是指光线穿过表面时的透射光辐射和入射光辐射之比。举例来说,制造防蓝光玻璃时可加上反光涂层,一方面反射紫外光以至蓝光,另一方面让其他波长的光线通过(如图F1所示)。
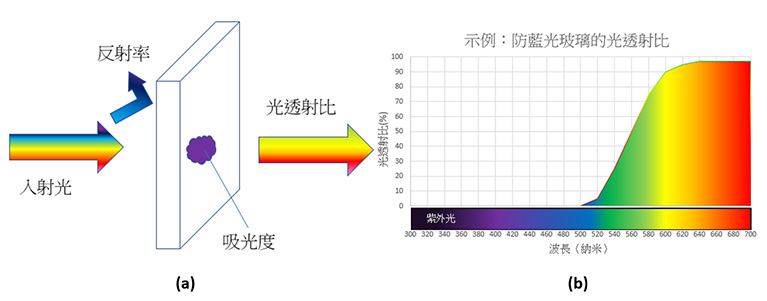 图F1.(a) 光透射比、反射率和吸光度;(b) 防蓝光玻璃的光透射比
图F1.(a) 光透射比、反射率和吸光度;(b) 防蓝光玻璃的光透射比
3). 智能电话使用的测光表应用程式
图5是智能电话使用的测光表应用程式示例,使用者可利用智能电话内的相机或环境光感测器测量「勒克斯值」。
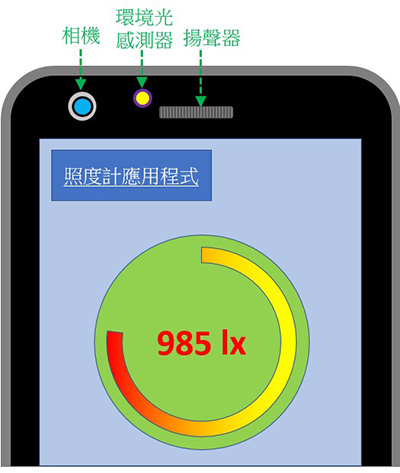 图5. 测光表应用程式示例
图5. 测光表应用程式示例
智能电话使用的测光表应用程式主要有两种,分别有利用环境光感测器和由相机作为光检测器。第一种(下称「环境光感测器型测光表应用程式」)较常见于使用安卓(Android)作业系统的电话,当中的环境光感测器开放予软件开发者使用;而iPhone电话则不鼓励开发者使用环境光感测器,凡使用这种感测器的应用程式均未能在App Store应用程式商店获得批准上架。这项限制令多数为iPhone而设的测光表应用程式只能选用相机作为iPhone的光检测器,这种程式下称「相机型测光表应用程式」。
智能电话的相机在变焦和成像方面的光学设计较为复杂,惟设计专为摄影而设,并非用于测量光照度。在使用环境光感测器与相机作为光检测器时,两者之间的主要差别如下:
- 环境光感测器直接测量光照度。
使用环境光感测器测量光照度时,应将其放在面向光源的目标区域。 - 相机测量目标区域的亮度(在光度学而言,亮度和光照度是两个不同的物理量)。
测量目标区域的光照度时,相机会拍摄该区域的影像以测量亮度,并透过假设该区域的反射率来把亮度换算成光照度。
由于相机型测光表应用程式在估算目标区域反射率时的不确定度较大,其准确度较环境光感测器为低,故下文将不再作深入讨论,而会集中探讨以环境光感测器进行的测量。
亮度通常指目标区域的光暗度。正式的定义是:在特定方向上某特定点的亮度(Lv),是指每单位球面度(sr)和每单位投影面积(m2)垂直于指定方向的光通量(lm),其测量单位为lm/sr/m2 [4]。
相机检测的物理量是目标区域的亮度。
相机感应器如何测量光照度?
相机通常会从有限的角度对焦目标区域并构成影像,然后测量目标表面反射光的光通量「密度」。如辐射功率或目标与光源之间的距离不变,目标区域的光通量「密度」亦会维持不变。因此,即使相机与目标表面之间的观察距离改变,相机仍会自动重新对焦该表面而得出相同的亮度结果。
图F2阐述相机如何估算光照度。光源照射目标区域的光照度是Ev,目标表面的反射亮度将会聚焦于相机感应器上作检测,其强度取决于目标区域的光照度Ev和目标表面的反射率R。之后,相机会透过假设反射率(例如基于过往的测试状况[5])来得出光照度。由于这个方法在估算目标区域反射率方面的不确定度较大,因此测量光照度的准确度较低。
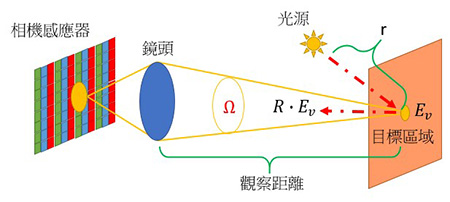 图F2. 目标区域在相机感应器上的成像。光源在距离r下照射目标。假设照射分布均匀,Ev是目标区域的光照度,R是有关表面的局部反射率,而Ω则代表观察系统的角度。
图F2. 目标区域在相机感应器上的成像。光源在距离r下照射目标。假设照射分布均匀,Ev是目标区域的光照度,R是有关表面的局部反射率,而Ω则代表观察系统的角度。
实验
图F3是一项简单实验,利用传统仪器级别的测光表和安装了相机型测光表应用程式的智能电话来量度目标表面的光照度,从中展示目标区域的反射率对有关应用程式读数的影响。相机型测光表应用程式因应反射率不同的目标表面,录得的光照度读数差距甚大-黑色背景录得38 lx,白色背景录得159 lx;传统测光表的读数则较为一致,约为256 lx。
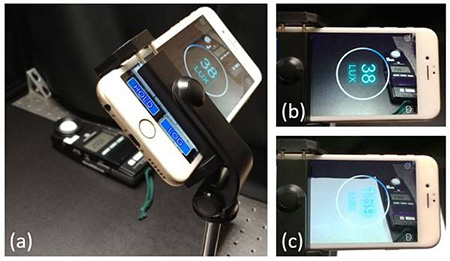 图F3(a)利用智能电话相机作为反射式测光表进行实验;以相机测量(b)黑色表面和(c)白纸录得的光照度读数。传统照度计的读数约为256 lx。
图F3(a)利用智能电话相机作为反射式测光表进行实验;以相机测量(b)黑色表面和(c)白纸录得的光照度读数。传统照度计的读数约为256 lx。
环境光感测器原用作探测智能电话的入射光强弱,从而自动调节屏幕的光暗度。图6显示典型环境光感测器的组装设计图。智能电话的屏幕下设有内置的环境光感测器晶片(其透光孔面积较细),晶片一般配备滤光镜用以感应可见光,并可能附有与环境光感测器晶片一同生产或装配的模制透镜,以加强光耦合作用。图7说明传统测光表与智能电话环境光感测器在受光角度方面的分别。传统测光表凸出的余弦散光器设计能以较大的入射角度接收外来光;相反,内置式的环境光感测器设计令受光角度有所局限,在多重光源的环境下难以量度出准确的余弦修正结果(例如图7所示的感应器便不能接收红线表示的光线)。
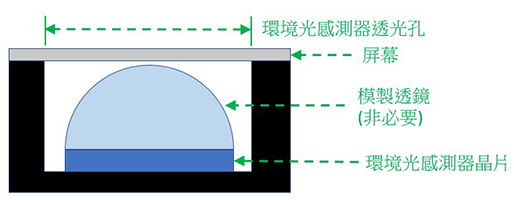 图6智能电话环境光感测器的典型组装设计图
图6智能电话环境光感测器的典型组装设计图
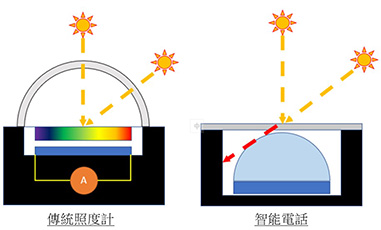 图7 来自不同角度的入射光
图7 来自不同角度的入射光
测量光照度的另一个关键元素是能与V(λ)函数匹配的响应度。图8展示三款坊间常见的环境光感测器感应晶片,其光谱响应度资料来自其数据手册。
图8(a)中的环境光感测器(下称「A类」)配备四个分别可响应红色、绿色、蓝色和白色光谱的光电二极体,这类环境光感测器亦可附有用于多重颜色感应的高光谱感应器阵列。这款环境光感测器晶片或其软件推动程式会对三原色感应器或白色感应器的感应电流分配不同的加权因子,用以计算「勒克斯」的数值。智能电话相机的影像感应器, 配备多组三原色感应器(或像素), 便类似这种环境光感测器。例如,三原色感应晶片可应用加权算式「(0.2126*R) + (0.7152*G) + (0.0722*B)」[2, 3],从「红(R)」、「绿(G)」、「蓝(B) 」颜色像素的输出水平计算出光照的强弱。
图8(b)是双频式环境光感测器(下称「B类」),它配备一个宽带感应器和一个红光至红外光感应器。B类光感测器会先计算两个感应器的输出电流的差额净值,再乘以修正因数来估算「光照度」的数值。
而图8(c)则展示另一款环境光感测器(下称「C类」),其光谱响应度与发光效率函数十分接近。
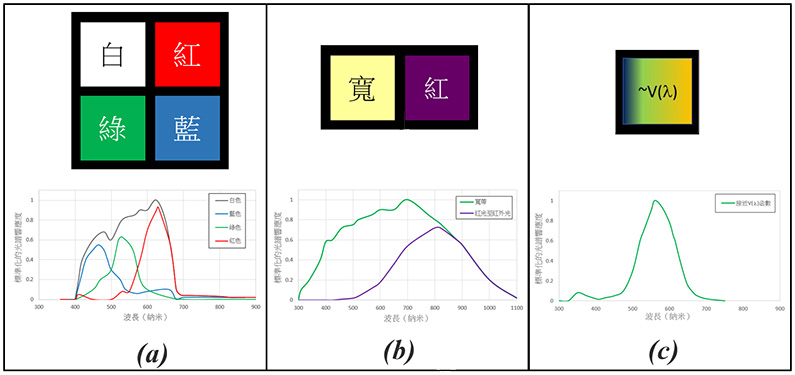 图8 环境光感测器晶片的常见类型((a)A类、(b)B类、(c)C类)
图8 环境光感测器晶片的常见类型((a)A类、(b)B类、(c)C类)
图9是上述三款常见的环境光感测器的标准化光谱响应度与V(λ)函数的比较,其中曲线(a1)是在可见光谱内有一条通带的A类白光感应器的光谱响应度;曲线(a2)是A类三原色感应器经过加权算式「(0.2126*R) + (0.7152*G) + (0.0722*B)」运算后得出的光谱响应度;曲线(b)是B类设计从宽带感应器减去红光至红外光感应器反应后得出的光谱响应度净值;而曲线(c)则是C类设计的光谱响应度。图9的图表显示,A类和B类设计(即曲线(a1)、(a2)和(b))的光谱响应度与V(λ)函数差异甚大, 其中B类设计在测量中吸收过量紫外光和红外光,而C类设计则与V(λ)函数较为吻合。不过,C类设计的滤光镜透射谱向红光偏移,且在紫外光波长范围出现一个细小的透射波峰,因此C类设计的滤光镜质素仍有改善空间。
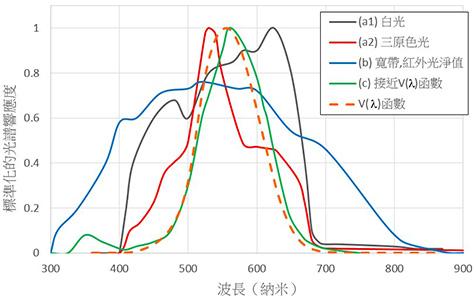 图9 A类至C类环境光感测器的标准化光谱响应度与V(λ)函数的比较
图9 A类至C类环境光感测器的标准化光谱响应度与V(λ)函数的比较
4). 讨论
从第3部分可见,智能电话内置的环境光感测器受其装配设计所限,未必能够提供良好的余弦修正光照度测量结果,而各款环境光感测器晶片的光谱响应度亦差异甚大,未必能够达到良好的V(λ)匹配反应。为进一步了解光谱错配的影响,我们就A类感应器的光谱响应度与LED灯和钨丝灯的光谱功率分布进行比较(见图10)。
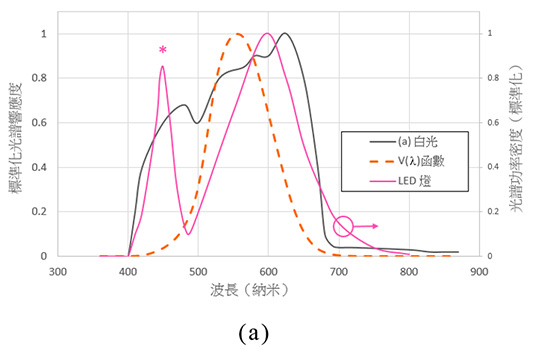
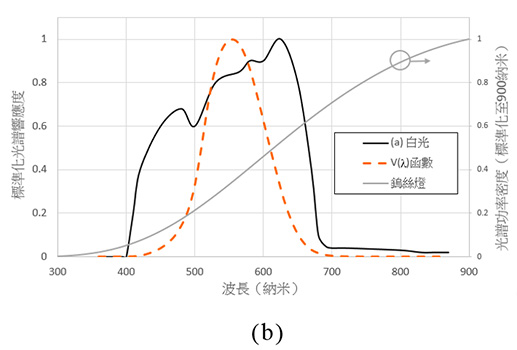
在两种情况下,A类白光感应器在蓝光区(波长约为400纳米至500纳米之间)和红光区(波长约为600纳米至680纳米之间)接收到的灯光功率均较高。例如,图10(a)中LED灯的蓝光波峰顶点(*)会成为环境光感测器的其中一大电流输出来源,导致光照度测量结果产生错误。再者,不同型号的智能电话亦可能内置了不同的环境光感测器晶片,即使利用相同的测光表应用程式,勒克斯读数仍会受不同型号的智能电话内的光感测器影响,使用者或难以知晓光照度测量结果的准确性。
综合以上讨论,虽然智能电话的测光表应用程式能提供十分方便的测光方法,惟使用者如重视光照度测量结果的准确性,便须留意这种测量系统的各种局限。
参考资料︰
[1] ‘Illuminance meters – Requirements and test methods’, British standard BS 667:2005.
[2] ‘Smartphone-Based Light Intensity Calculation Application For Accessibility Measurement’, N. Negar et al., RESNA ANNUAL CONFERENCE – 2014.
[3] ‘Why You Should Forget Luminance Conversion and Do Something Better’, Rang M. H. Nguyen et al., 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).
[4] ‘Handbook of applied photometry’, C. DeCusatis; Optical Society of America, 1997
[5] Estimating luminance and illuminance with reflection-type exposure meters and an 18% neutral test card, Kodak, 1999
时间及频率
在中国香港不同的地方,时间的流逝速度会有不同吗?

标准及校正实验所
先进通讯技术实验所
欧阳颂辉博士、杨承隆博士
国际单位制的时间单位为「秒」(s),是通过铯频率ΔvCs的固定数值来定义。铯频率指铯133原子在不受干扰基态的超精细能阶跃迁频率,频率值为9 192 631 770 Hz。
标准及校正实验所负责为香港维持时间和频率的参考标准,自1986年起便利用铯原子钟来实现国际单位制的秒,目前采用的铯原子钟准确度达8 x 10-14,即每40万年误差仅约为1秒。
 图1:标准及校正实验所的铯原子钟
图1:标准及校正实验所的铯原子钟
「时间」在物理学上具有深层意义。很多人都曾听过爱因斯坦的相对论,当中主张时间并非绝对。这引申出一个深奥的问题 — 时间在中国香港不同的地方会有相同的流逝速度吗?倘将铯原子钟放在(a)星光大道或(b)大帽山山顶,铯原子钟量度的时间是否一样?
 (a)
(a)
 (b)
(b)
要回答这个问题,先要更深入了解爱因斯坦的理论。相对论实际上有两种,分别是狭义相对论和广义相对论。爱因斯坦在1905年发表了狭义相对论,提出时空这个新概念。三维空间与一维时间共同构成四维时空。时间并非绝对,而是会随着观察者和时钟的参考系的相对运动而变化。简单来说,在观察者眼中,移动中的时钟会走得慢了,这就是以洛伦兹变换命名的洛伦兹时间膨胀。洛伦兹变换涉及两个相对以均速运动的惯性系时空坐标之间变换的关系。
即使在观察者和时钟彼此相对上皆是静止不动的情况下,仍可发生时间膨胀现象。爱因斯坦早在1915年发表的广义相对论中,已对另一种时间膨胀现象,即引力时间膨胀作出预言。
1905年以后,爱因斯坦发现部分公认的物理学理论,包括牛顿的引力理论,与狭义相对论并不一致。为解决两者的不一之处,爱因斯坦提出广义相对论,对引力提出截然不同的观点。根据牛顿的理论,引力是物体之间因质量而产生的吸引力;而在爱因斯坦的理论中,引力是大质量物体造成时空弯曲所产生的结果(图3)。
 图3. 时空曲率
图3. 时空曲率
简单来说,物质(广义上包括质量、能量和动量)会扭曲周围的四维时空,在弯曲的时空中移动的其他物体,便会显得受一股称为引力的力量所影响。
在广义相对论中,著名的爱因斯坦场方程式阐述了时空几何与物质分布的关系。
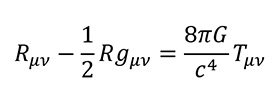 (1)
(1)
这个张量方程式涉及高阶数学,本文只能稍作介绍。参数Rµν、R和gμν代表时空曲率,而Tµν,(称为能量-动量张量)则代表大质量物体的影响。G是引力常数,而c则为光速。
由于大质量物体会扭曲周围的时空,因此作为四维时空其中一项元素的「时间」便会视乎引力场的强度,以不同的速度流逝。这就是引力时间膨胀的基础。综上所述,引力场愈强,时钟便运行得愈慢。
要计算引力时间膨胀的影响,可以运用以下从史瓦西对爱因斯坦场方程式的解法推导出来的方程式计算。
 (2)
(2)
其中:
G是引力常数 (6.6743 x 10-11牛顿平方米/平方公斤)
M是产生引力场的质量
r是物体与质量中心之间的距离
c是真空中的光速 (299792458米/秒)
tf是参考观察者于距离为无限远时的时间流速
to是物体与质量之间的距离为r时的时间流速
地球的质量(M)约为5.9722 x 1024公斤;在中国香港,地球的半径(r)约为6.375 x 106米。
现在让我们回到问题:时间在星光大道和在大帽山山顶是否以同等速度流逝?要得知答案,先要知道这两个地方的高度。
星光大道: 5米*
大帽山: 957米*
*由「香港主水平基准」向上计算,其基准处于「平均海平面」以下约 1.3 米。
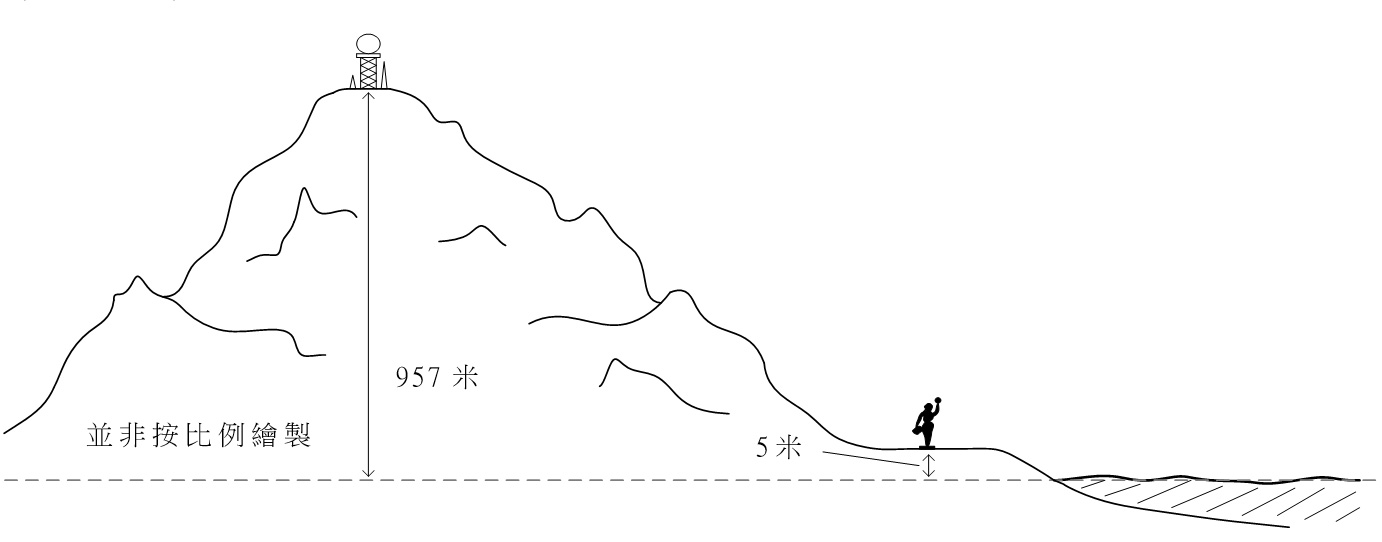 图4. 时间在不同高度的流速
图4. 时间在不同高度的流速
接着,我们可以运用方程式(2),计算物体在星光大道(taos)和大帽山山顶(ttms)的时间流速︰
 (3)
(3)
 (4)
(4)
ttms与taos的比率如下︰
 (5)
(5)
计算结果显示,原子钟在大帽山山顶上运行的速度,较在星光大道快约1.000 000 000 000 104倍。由于一天有86 400秒,因此将原子钟由星光大道移往大帽山山顶,原子钟每日便会运行快约9纳秒 (9 x 10-9 s)。
不过,引力时间膨胀只会影响最精准的原子钟。以地球表面计算,每升高1米便有约1016分之一的相对时间膨胀差异,但这种差异对一般时间和频率测量仪器的影响可说是微不足道。
爱因斯坦在1915年发表场方程式后不久,史瓦西便发现了于球形质量外围的引力场的精确解。
假如没有引力场,时空是平坦的,两件事件之间在球面坐标的距离(ds)可以用下列方程式表达:
 (6)
(6)
史瓦西发现,在有球形质量M的情况下,时空会遵循爱因斯坦场方程式而扭曲。上述方程式会变成下列方程式,又称为史瓦西度规。
 (7)
(7)
计算引力时间膨胀的方程式可从史瓦西度规直接得出。
与我的11岁儿子畅谈量子物理学
(第1部分:原子钟和铯-133原子的超精细能阶跃迁)

黎孝华博士
射频实验室
标准及校正实验所
一天晚上约9:30
爸爸,可以说一个故事给我听吗?
没有问题,等一秒(等一下)吧!
我现在可以了,你现在可以吗?
是的,我准备好了。我已经等了您很多秒!您的一秒钟真是太长!我们是否活在一个平行时空?
哎,请不要嘲笑爸爸,我需要完成手头上的工作。我知道你最近的数学课正好是学习关于时间的单位换算,就让我说一个关于秒的故事吧。
关于秒的故事?听起来很有趣,我从来没有听过,快说给我听吧!
秒是时间的单位,是国际单位制(SI)七个基本单位中的其中一个。它一般可以理解为一天的86400分之一。
是的,一天有86400秒,只需要把60秒 x 60分钟 x 24小时便可以计算出来。
然而,对于时钟的每一滴答声就是一秒,你可知道其间隔是如何定义的吗?
我猜科学家可以运用一些仪器去测量一年里的总秒数,然后再与自己的时钟作比对。
用数量比对这个方法是个好主意,但应该不容易实行,你知道为什么吗?
这种方法似乎不容易实行,因为我们需要用很长的时间去收集时间数据。此外,老师曾经告诉过我,地球的自转速度是不稳定的。
不错。这就是为什么科学家有时候需要增加闰秒。最近因为2021年地球自转的速度加快了,有消息称科学家正在辩论应否增加负闰秒以作补偿。因此,我们并没有一个恒定的参考去作比对。你认为还有哪些其他的方法可以使用?
我想就像用来测量长度的间尺一样,我们可以通过使用更精细的间尺来提高准确性。同样原理,我们可以使用一个较精准的时间标度来定义一秒的间隔。如果有非常稳定并且比一秒钟要运转得更快的机器,可能会有用。
这是个好方法!随着量子力学的发展,科学家们不再将时间与地球的移动作比对,而是与某种原子的频率作比对。即以天文观测来测量时间的方法已经被监测频率的方法所取代。
那么我们如何将时间与原子的频率联系起来?
我们是使用原子钟。国际原子时(TAI)是通过全球约400台原子钟来建立的参考时间。
香港有原子钟吗?
(笑)我们当然有。在我工作的实验室里便有两套铯原子钟用作香港的频率标准。我曾经负责操作它们。让我给你看张照片。

哇!真棒!。我想了解更多。甚么是原子钟,以及如何用它去定义秒?
我先给你正式答案。看看你能否理解。
1967年,国际计量局(BIPM)选择了铯133原子来定义秒这个单位。秒的定义最近于2019年5月20日修订为:
国际单位制的时间定义为秒,该单位符号为s。它是通过铯频率的固定数值来定义。铯频率指铯133原子在不受干扰基态的超精细能阶跃迁频率,频率值为9 192 631 770 Hz。单位Hz等同于s−1。
我一个字都听不懂!
不用担心,当你长大后并在大学里学习理科时便会了解它们。
但我现在便想了解它。您能以最简单的方式来解释给我听吗?
好的。那让我试试吧。
什么是铯?
铯是一种在28.5°C时即熔化的金属,带银金色。将它放入水中会爆炸。因此,它是一种危险的物质。
那当您操作铯原子钟时,会发生爆炸吗?我很担心您有危险啊......
放心吧,没问题的。原子钟仅储存极少量的铯,并且被密封在管中,与水份隔绝。
铯133中133这数字是什么意思?
一个原子是由三种类型的基本粒子组成,名为电子,质子和中子。质子和中子的总数称为原子的质量数。铯原子具有55个质子和55个电子,但可能具有不同数量的中子。铯133是一种具有78个中子的铯原子。质量数为55 + 78 = 133。
我知道什么是电子,质子和中子。我最近读了一本关于科学的书。它说电子,质子和中子是带有负,正,及无电荷的微小颗粒。它也说质子和中子位于原子的原子核中心,电子在原子核周围移动。不同的原子具有不同数量的电子,质子和中子。世界上的一切都是由原子组成的!
非常好!我都不知道原来你已经认识那么多东西。你确实讲得对的。我把它画在电子黑板上......

外围的电子和中间的原子核看起来就像围绕着地球旋转的月亮一样。
我在这张图中只简单地画了一个点去表达那55粒电子。实际情况有点复杂,但暂时可以先用这种方式去理解。
铯原子具有55个电子。这意味着有55颗月亮。我无法想象它们是如何分布的?
你可以想象它们像土星环那样分布。 土星环由几层环组成。 每层由不同数量的彗星,小行星或破碎的卫星组成。 铯原子或其他原子的电子分布与此相似。
铯有六层电子,在量子物理学中,这些层通常称为能级(n),每个能级具有不同数量的电子。 让我在黑板上画出电子的分布。 在其最外层只有一粒电子。

这些电子可以从一个能级移动到另一个能级吗?
他们是可以移动的。
如果电子从高能量的能级移动到较低能量的能级,则会发射一种称为光子的粒子。
我们可以看到光子发出的光吗?
这取决于光子的频率。频率是指振荡速率。
因此,您提到的9 192 631 770 Hz是光子的频率。
正是!
我们可以看到频率为9 192 631 770 Hz的光子吗?
我们看不到。因频率太低,超出了我们眼睛的可见范围。但是我们可以使用电子电路来侦测。就像我们在原子钟中使用的电路。
什么决定光子的频率?
这取决于两个能阶之间的差异。我们可以使用这个方程式进行计算。h是普朗克常数。普朗克是一位非常聪明的科学家。他于1918年获得诺贝尔物理学奖。
如果9 192 631 770 Hz是低频,这是否意味着从E2跃迁到E1之间的能量差很小?
是的,这就是为什么我们称这个跳跃为超精细能阶跃迁。
我记得您在两年前绘制了一个具有许多水平线的图表。您非常喜欢该图并将这幅图贴在书台上。它与超精细能阶跃迁有关吗?

是的。我刚告诉过你,我曾经负责操作铯原子钟用作香港的频率标准,所以我需要了解这幅图。
看起来超酷,可以解释给我听吗。
不,那太困难了。
什么是F?
...
什么是mF?为什么mF有这么多的层级?
...
您经常教我:“罗马不是一天建成的,学习亦然。知识是要终身努力才能获得的东西。”我目前可能不了解的东西,说不定能启发我......
快说吧!
那好吧,让我试试看能不能使你明白。F是我们称为Cs-133原子的总角动量。
总角动量!感觉是那么拗口。
这个概念实际上很简单。你知道什么是陀螺吧。它会旋转。电子,质子和中子都像陀螺一样旋转。角动量是量度这些粒子自旋的速度。对于电子,质子和中子,它们的角动量只有两个值,即+1/2或-1/2。我们通常称它们的角动量为自旋。
那么,电子不能具有其他值的角动量吗,例如0或1.23?
不,电子,质子和中子的角动量只能有离散而不连续的值。这就是为什么我们称这门科学为量子物理学。
为什么角动量有这样的特性?
大自然就是这样,没有人知道原因,甚至连爱因斯坦也不知道为何这样。
说到总角动量,是否F等于所有55个电子,55个质子和78个中子的角动量加在一起?
从某种意义上来说是对的。幸运的是,大多数电子,质子和中子都是成对并以相反的自旋而存在的,从而彼此抵消。因此,我们可以简化一个Cs-133原子的总角动量F取决于最外层电子在n = 6能阶下的自旋J和原子核的自旋I。
那么F = I + J?
类似这样。在量子物理学中,我们用一条特殊的规则将两个自旋加在一起。J的值为1/2,I的值为7/2。视乎最外层电子与核的自旋的相对方向,总自旋F可以等于|I – J| ,即是3,或|I + J|即是4。
F = 3和F = 4就是那两个超精细能阶吗?
正确的!你真聪明。
为什么两个超精细能阶具有不同的能量?
我们可以想象电子和原子核为极微小的磁石。两个超精细能阶对应于两个磁体是否指向相同的方向,我把它们画在黑板上。你认为代表电子的磁石较容易停留在F = 3的状态还是F = 4的状态?

我的老师教过我,磁石的北极会吸引南极,并排斥另一个磁石的北极。因此,我认为保持F = 3状态会更容易。
对,我们需要额外的能量才能使原子从F = 3状态变为F = 4状态,因此,他们之间存在一个能隙。
为什么我们称其为超精细跃迁?有“不精细跃迁”吗?
F = 3和F = 4状态之间的能量差非常小,因为原子核的磁场远弱于电子的磁场。
为什么原子核的磁场会是弱的?
这是因为组成原子核的质子和中子的质量比电子大得多,而粒子的磁场与其质量成反比。你只能相信我所说的,因为我现时无法告诉你大自然为何会有这种现象。
为什么会有这么多的mF层级?
我先前已经说过,电子,质子和中子是极微小的磁石。如果对Cs-133原子施加外在磁场,则不同方向的磁体将具有不同的能量。结果,能量层级将被再进一步分割。
在F = 4,我发现mF有9個水平。
是的,磁场会将F的超精细能阶划分为(2F + 1)个子能级
当F = 3时,(2F + 1)等于7,所以我们有7个子级别。
正确的!
因此,在F = 4的9个子层级中的任何一个都可以转换到F = 3的7个子层级,那么我们不是有很多不同的跃迁吗?而每个跃迁可以产生不同的频率吗?
在原子钟中,我们仅利用从(F = 4,mF = 0)到(F = 3,mF = 0)的跃迁。如图上的标记。
这就是产生9 192 631 770 Hz频率的超精细跃迁吗?
是的,总而言之,超精细结构是由从电子运动和核自旋的磁场相互作用引起。
现在,我学会了很多有关铯-133原子超精细能阶跃迁的东西。我还有一个问题,我们花了很多精力来定义秒,并设计了一套非常复杂的系统。其实,为什么我们需要有一个这么高精度的时钟呢?对于一般人来说,这种准确度未必是必需的?
我想很多人可能有同样的问题。但是,在人类历史上,有很多例子表明了更精确的测量将可以促进科学技术的突破性发展。就让我举一个例子。在19世纪,阿尔伯特·迈克尔逊改善了他的干涉仪设计,能非常精准地测量光的速度,幷证明了光速是恒定的。结果成为推动爱因斯坦发展相对论的重要理据。
原來如此。
下图显示了国际单位制(SI)基本单位之间的关系。可以看出,除了基本单位摩尔(mol)之外,另外的5个基本单位都取决于秒。如果我们可以提高时间的精度,那么另外5个SI基本单位的精度都能受惠。

在推动使用铯133定义时间的SI基本单位中,谁的贡献最大?是我的榜样爱因斯坦吗?
阿尔伯特·爱因斯坦以他的狭义相对论和广义相对论彻底改变了物理学。 他是一位伟大的科学家,但是还有许多人为现代科学做出贡献的,包括杨格,马克士威,赫兹,波利,米歇尔森,普朗克等。
就像足球队一样,球队中的每一个人,包括球员,教练,医疗队等,都必须共同努力才能成功。
希望有一天我也能为科学发展作出贡献。
我很高兴听到你这样说。
已经晚上11:30,你们两个还在说甚么!明天还需要早起上学和上班!
这个故事很有趣,我还不想睡觉。
哦,明天可以继续。
我们明天继续故事吧。
好的,晚安!
对于电子自旋,我在想一些事情。
那是什么?
盗梦空间......
大声笑......让我们进入我们的潜意识。
(在爸爸的脑海中......十年后我们的对话将会如何?他将来会学习科学和工程吗?让我写一封关于量子物理学的信让他十年后看......)
Zzz.................
(待续)
测温学
温度的物理意义是否真的艰深到难以理解?

标准及校正实验所
温度实验所
林凯珊 张志培
温度并不简单
温度影响我们的日常生活,人人皆知温度与冷暖的感受有关,却鲜有人会思考其物理意义。
思考过这个问题的人会发现,温度与热力学第二定律有密切连系。因此,国际单位制(SI) 便特别为这个物理量采用「热力学温度」一词。为简单起见,本文余下部分将以「温度」指称「热力学温度」。
在七个国际单位制基本单位所代表的量中,温度的物理意义被指是最难理解的,就让我们看看能否推翻这种说法。
温度的最简单定义
温度应该是这样的一个量,能量总是会从高温的地方流向低温的地方。当两个物体进行热接触时,如果没有发生能量流动,便即是两个物体处于相同温度。这就是温度的最基本定义。
可惜,这个定义没有太大用处。要理解温度的意义,需更详细研究能量和统计理论。
温度与能量之间的紧密联系
2019年出版的《国际单位制手册》第九版指出:「波兹曼常数k是对应温度(单位:开尔文)和能量(单位:焦耳)的量之间的换算系数,……」
及
「一个系统的温度与热能成比例关系,但对系统的内部能量却并不一定有此必然关系。」
显然,温度与能量密切相关。究竟两者之间的关系为何?
温度只是能量的别称吗?
假设有一个气体样本,其质量等于m、能量等于U、体积等于V、温度等于T,而压力等于P。如果加入一个相同的样本,合并后的气体样本会有以下属性:质量等于2m、能量等于2U、体积等于2V、温度等于T,而压力等于P。
| 气体样本1 | 气体样本2 | 合并后的气体样本 | |
|---|---|---|---|
|
质量 = m 能量 = U 体积 = V 温度 = T 压力 = P |
质量 = m 能量 = U 体积 = V 温度 = T 压力 = P |
质量 = 2m 能量 = 2U 体积 = 2V 温度 = T 压力 = P |
由此可见,质量、能量和体积的数值与系统大小成正比,称为广延量;反观温度和压力的数值则不受系统大小影响,称为强度量。强度量通常是两个广延量之间的比例。
显而易见,广延量不能同时也是强度量,因此温度与能量并不相同。
那么把温度定义为系统中的粒子平均动能又如何?
由于粒子(如分子或原子)的平均动能属强度量,因此这种定义较为可取。事实上,物理学入门课程亦常以此解释温度的物理意义。
就单原子组成的理想气体而言,其内在能量包含原子平移运动的动能。当U是内部能量、N是粒子数目、k是波兹曼常数,而T是温度时,我们可以得出以下结果:
 (1)
(1)
这个结果显示温度与单个原子的平均动能(U/N)构成直接关系。
然而,当涉及双原子气体、液体和固体时,情况就变得复杂。除平移运动的动能外,这些物质的内部能量形式还包括转动能、振动能和势能。虽然以平均动能来解释温度会较易理解,但这作为定义却未如理想,因此需要一个更严谨和通用的定义。
大多数热物理学教科书如何定义温度?
在大多数热物理学教科书中,温度的定义如下:
 (2)
(2)
从字面上看,温度是熵的改变量除以内部能量的改变量的倒数,而系统的体积和粒子数目则维持于固定值。
为准确表达科学概念,物理科学的教科书常常载有使用微积分符号的数学方程式,例如温度(T)的定义通常以下列方程式表示:
 (3)
(3)
其中T是温度、S是熵、U是系统的内部能量、V是体积,而N是系统的粒子数目。
即使没有读过微积分,这道方程式也不像看起来般难解。如果把熵(S)与系统的内部能量(U)绘制成图,偏微分 仅为曲线的斜率,而系统的体积(V)和粒子数目(N)维持固定。温度是该斜率的倒数。
仅为曲线的斜率,而系统的体积(V)和粒子数目(N)维持固定。温度是该斜率的倒数。
这道方程式看似简单,但难处固然在于理解熵的意义。十九世纪的科学家便花了数十年时间才能解读其意义,而这亦是很多人认为温度的物理意义难以理解的主要原因。不过,在统计力学领域的科学家们成功阐明熵的性质至今已逾百年。只要有一点耐心,我们定能理解熵的本质。
甚么是熵?
1877年,路德维希.波兹曼(Ludwig Boltzmann)对熵作出以下定义:
 (4)
(4)
当中S是熵、k是波兹曼常数,W(多重度)是系统可及的量子状态的数目。这是热物理学其中一道最著名的方程式,镌刻在波兹曼的墓碑上。
要理解这道方程式,我们需要知道甚么是宏观状态和微观状态。一个系统的宏观状态是指其宏观性质,例如温度和压力;微观状态则指系统在特定时刻的具体微观排列。
每个宏观状态都存在很多个会演化成相同宏观状态的微观状态,称为宏观状态的多重度。多重度的对数就是熵。
统计力学的基本假设是在处于热平衡的孤立系统中,所有可及的微观状态出现的机率均相等。因此,如有两个宏观状态,其中微观状态数量较多(即多重度较高)的一个宏观状态出现的机率会较高。
同样地,当孤立系统趋向热平衡时,便很可能是处于微观状态数量最多的宏观状态,即最大的熵;当孤立系统远离热平衡时,则很可能会朝着熵较大的宏观状态演化。换言之,熵总是会增加。这就是著名的「热力学第二定律」。
为对多重度这个重要概念有个大概认识,让我们一起看看一个在摄氏23度及1标准气压的0.001立方米氦气的样本:当中由「萨克尔-泰特洛德(Sackur-Tetrode)方程式」计算出来的熵(S)是5.15 JK-1,微观状态的数目(W)是e3.73x1023。这个数字十分庞大,一般计算机进行运算时会出现溢位。
单原子理想气体系统的熵可用萨克尔-泰特洛德(Sackur-Tetrode)方程式计算得出。这道方程式约源于1912年,由萨克尔 (Otto Sackur)和泰特洛德 (Hugo Martin Tetrode)各自提出。
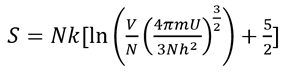 (5)
(5)
当中
N是原子数目、V是系统容量、m是原子体积、U是系统的内部能量,而h是普朗克常数。
熵、温度与能量流动的方向
以下内容结合熵的概念和统计力学的基本假设,解释为何以方程式(3)定义温度会得出能量总是从高温地方流向低温地方的预期结果。以下内容,即使没有学过微积分也能理解。要透彻理解的话要多花一点点功夫,但却饶有裨益。
假设两个系统处于热接触状态,其内部能量分别为U1和U2,而w1(U1)和w2(U2)是这两个系统分别可及的微观状态数目。两个系统合并后可及的微观状态总数wc(U1, U2)如下:
 (6)
(6)
我们早前已定义熵(S)为S = k log w。在方程式的左右两方取对数。
 (7)
(7)
方程式显示熵属广延量。系统合并后的总能量(Uc)等于U1 + U2。在孤立的系统中,Uc是守恒不变的。由于Sc(U1, U2) = S1(U1) + S2(Uc - U1),因此Sc(U1, U2)可以简化为Sc(U1).
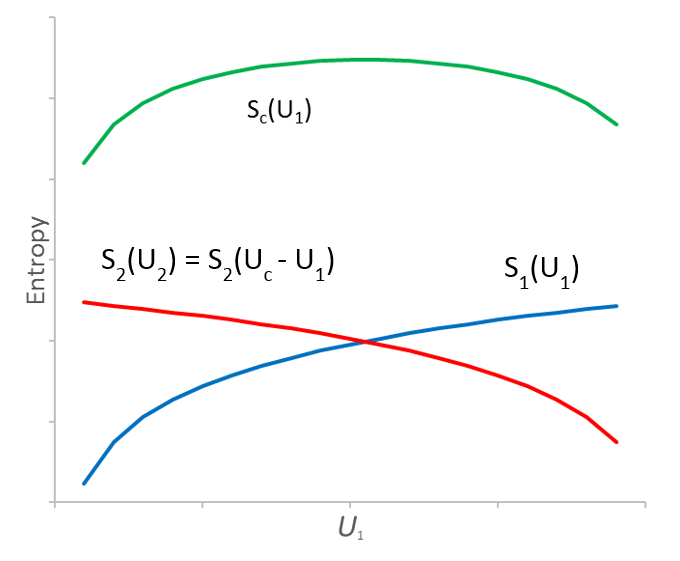 图1 两个处于热接触的系统因能量流动而令熵有所改变
图1 两个处于热接触的系统因能量流动而令熵有所改变
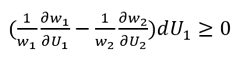
当能量ΔU从系统1流向系统2,U1便会减少ΔU,而U2会增加ΔU,Sc(U1)的数值亦会有所改变。这些数量的关系显示在图1。根据统计力学的基本假设,ΔU会向wc(U1, U2)和Sc(U1)数值增加的方向流动,因此,Sc(U1)的变化(以ΔSc(U1)表示)会大过或等于零。ΔSc(U1)可利用以下算式计算:
 (8)
(8)
让我们以 表示S1(U1)与U1的变率,则
表示S1(U1)与U1的变率,则 。同样地,
。同样地, 。ΔSc(U1)可简化成:
。ΔSc(U1)可简化成:
 (9)
(9)
由于ΔSc(U1) ≥ 0,如果ΔU > 0(即能量从系统1流向系统2),我们便会得出:
 (10)
(10)
因此,以熵(S)相对于内部能量(U)变率的倒数来定义温度,与能量总是从高温地方流向低温地方的预期结果是一致的
希望藉此简介,大家可以更加了解温度和熵的物理意义。
以下讨论内容专供懂得微积分的人士阅读。
合并系统的总能量为Uc = U1 + U2。总能量Uc维持不变。当两个系统之间发生能量流动,便可得出dU1 = -dU2。
合并系统的可及微观状态总数可从下列等式得出:
 (11)
(11)
根据统计力学的基本假设,U1和U2数值的转变方向会令wc(U1, U2)倾向增加,即dwc ≥ 0。
 (12)
(12)
由于dU1 = -dU2,便可得出
 (13)
(13)
使用恒等式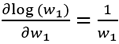 后,便可得出
后,便可得出
 (14)
(14)
由于熵为S = k log w,便可得出
 (15)
(15)
如果dU1 < 0(即能量从系统1流向系统2),便可得出
 (16)
(16)
因此,方程式(3)所界定的温度符合能量从温度较高的系统流向温度较低的系统的预期。
感受水蒸气

标准及校正实验所
湿度实验所
李河堂 林凯珊
1) 感受水蒸气
夏季的相对湿度可以高达90 %RH 以上,我们置身在这种闷热潮湿的环境里,可能还会感受到身边无形的水蒸气呢! 你会否想过,我们只要透过一个简单的实验便能令这些无形的水蒸气变得清晰可见呢?若你佩戴眼镜,可能你已经从日常生活当中轻易取得答案。夏天时,当你从冷气房间走到户外,空气中的水蒸气会在冰冷的镜片上凝结成无数的小水珠,令眼镜表面起雾。这种水蒸气的凝结现象看似普通不过,但个中的物理学原理却是准确测量相对湿度的基础之一。
 图1. 在冰冷镜片上的凝结的水珠
图1. 在冰冷镜片上的凝结的水珠
2) 何谓相对湿度?
湿度是气体的水蒸气含量。湿度测量学是一门研究如何准确量度湿度的科学。它会透过不同方式来量化空气中的湿度,例如相对湿度、露点温度,以及水蒸气的摩尔分数或质量分数,当中以相对湿度最为常用。
空气能容纳有限的水蒸气,其最大容量是以饱和水蒸气压ew(t)[单位:千帕斯卡(kPa)]来定义,即图2中以温度t为函数改变的饱和线。相对湿度[单位:%RH]就是以饱和水蒸气压的百分比来表示的水蒸气压水平,如图 2中显示的10 %RH和50 %RH相对湿度的水蒸气压线。当水蒸气压达到饱和水蒸气压的水平,相对湿度便会达到100 %RH,而空气中的水蒸气就会凝结成露珠(即水珠)。
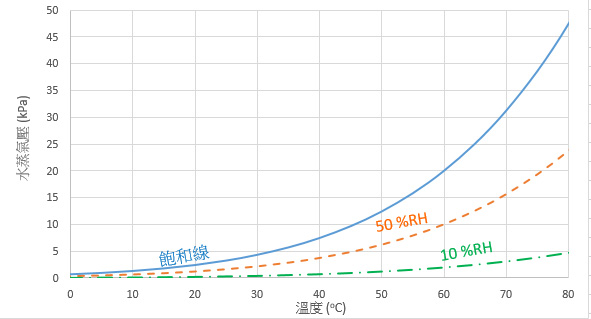 图2.在不同温度下的饱和水蒸气压以及在50 %RH和10 %RH情况下的水蒸气压(假设气体处于理想气体的状况)
图2.在不同温度下的饱和水蒸气压以及在50 %RH和10 %RH情况下的水蒸气压(假设气体处于理想气体的状况)
3) 相对湿度与露点温度的测量
水蒸气的凝结现象,不仅是反映水蒸气压达至饱和的有效指标,还能用于厘定环境的相对湿度。以图3为例,红点是一个低于饱和点ew(60 °C)的未知空气水蒸气压。如果把空气的温度逐渐降低,其饱和水蒸气压会随着饱和线下降。假如水蒸气的含量固定不变,水蒸气压在整个冷却过程便会维持不变。当空气的温度降至td,饱和水蒸气压ew(td)会相等于水蒸气压的现有水平,而水气便会在饱和的状态下凝结成露珠。凝结出现时的温度称为露点温度td,如图3例子中的露点温度为45.8 °C。假设空气处于理想气体的状况下,我们可以运用以下方程式计算空气在60 °C时的相对湿度:
相对湿度 = 
 图3. 用于估算相对湿度的露点温度
图3. 用于估算相对湿度的露点温度
4) 镜面冷凝式露点湿度计
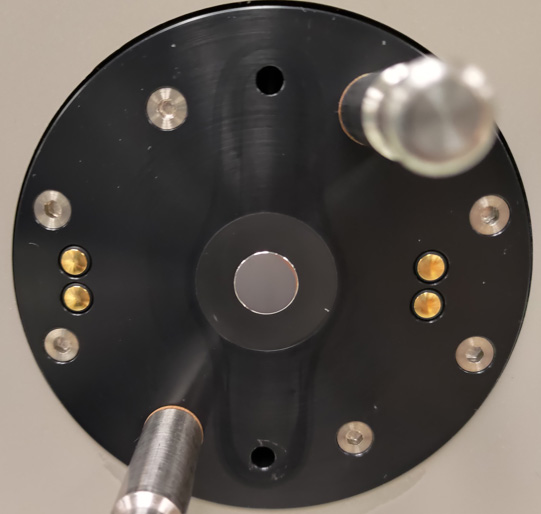
镜面冷凝式露点湿度计是利用凝结现象来准确测量露点温度的仪器。仪器露点温度的测量不确定度通常少于0.1 °C,相当于在室温下的不确定度为0.6 %RH以下。这部仪器包括一面高度抛光的镜片(如图4所示)。镜片温度由一个多层的热电冷却器精准控制,并受一个内置的铂电阻温度计监察。露点湿度计内的光学反馈系统由一个单色光源和数个监察光电探测器组成,用于探测凝结现象并稳定凝结状态。图5(a)的光电探测器1(PD1)负责监察来自镜片的镜面反射光,光电探测器2(PD2)则负责监察散射光线。当镜片温度高于露点温度,来自光源的入射光便会被抛光镜片反射至PD1,而PD2不会接收到任何光学讯号。当镜片温度冷却至露点温度,镜片表面便会凝结出一层露珠(如图5(b)所示),入射光会以不同角度散射,令镜面反射光大幅减少。透过监察PD1和PD2分别接收到的反射光学讯号和散射光学讯号,便能探测水蒸气的凝结程度。该反馈系统随后会微调镜片温度,直至凝结现象达到平衡状态(即露珠既不增加也不蒸发)。最后,由铂电阻温度计在平衡状态下所测量的温度即为露点温度,用以计算相对湿度。
 (a)
(a)
 (b)
(b)
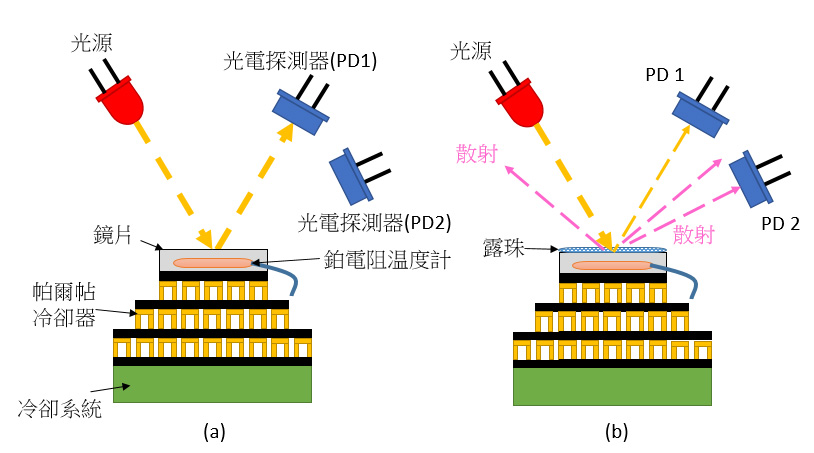 图5. 用于测量露点温度的冷凝式镜片探测器的常见结构。(a)和(b)分别为镜片温度高于露点温度和相等于露点温度的情况
图5. 用于测量露点温度的冷凝式镜片探测器的常见结构。(a)和(b)分别为镜片温度高于露点温度和相等于露点温度的情况
5) 其他常见的相对湿度测量仪器
市面上其他种类的相对湿度测量仪器甚多。我们会在本部分探讨其中一些常见的仪器,例如干湿球湿度计、电湿度计和机械湿度计。
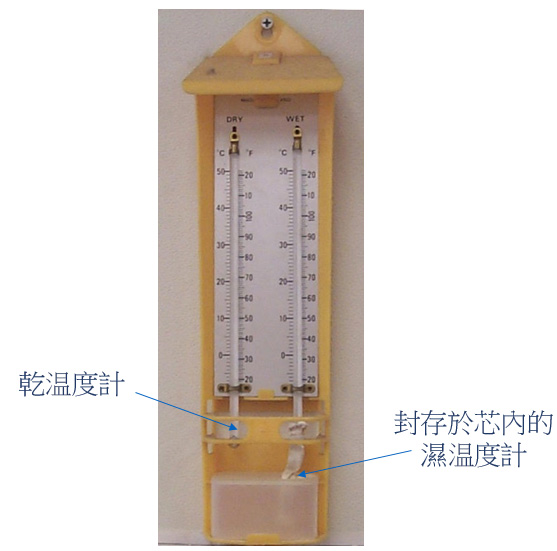
5.1. 干湿球湿度计
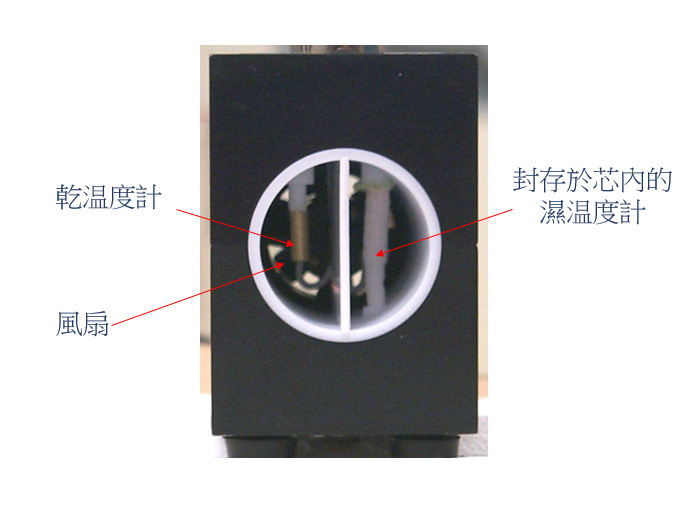
干湿球湿度计由两个温度计组成,一个用于量度空气的温度(即干球),另一个则封存于芯内,并利用储水箱的毛细效应令芯内保持湿润(即湿球)。芯内水分的蒸发速度随着环境的湿度水平而改变,而水分的蒸发会使湿球得以冷却。空气的水蒸气压ew(td)数值可以运用下例方程式,从干球(tdry)与湿球(twet)之间的温差计算出来:

其中P代表大气压力,而A则代表干湿计系数,典型值为0.00067。干湿球湿度计可分为通风干湿球湿度计和非通风干湿球湿度计两种。通风干湿球湿度计内设有通风扇,提供恒定气流,令测量结果较为准确。图6为这两种干湿球湿度计的实物图。干湿球湿度计的测量不确定度一般约为2 %RH至5 %RH。
5.2. 电湿度计
电湿度计内的电阻式或电容式感应器以吸湿材料造成,并置于两组电极之间。吸湿材料的电阻性或电容性会因应吸收的水量而改变。电阻式湿度计的吸湿材料可以是固定于两根玻璃棒之间的液态电解质,而电容式湿度计的吸湿材料则可以是一层聚合物薄膜。为免受尘埃和污染物污染,感应器一般会封装起来,如图7的感应器实物图片。电湿度计的测量不确定度一般约为2 %RH至3 %RH。当使用介电质材料时,湿度的升序和降序或会导致水分吸收率出现更为显著的差异。这种差异在测量不同湿度的测试序列时或会造成迟滞误差,宜多加注意。
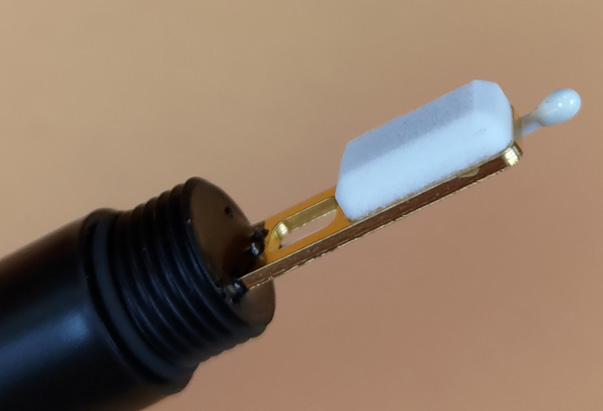 (a) 已封装的电解电阻式感应器
(a) 已封装的电解电阻式感应器
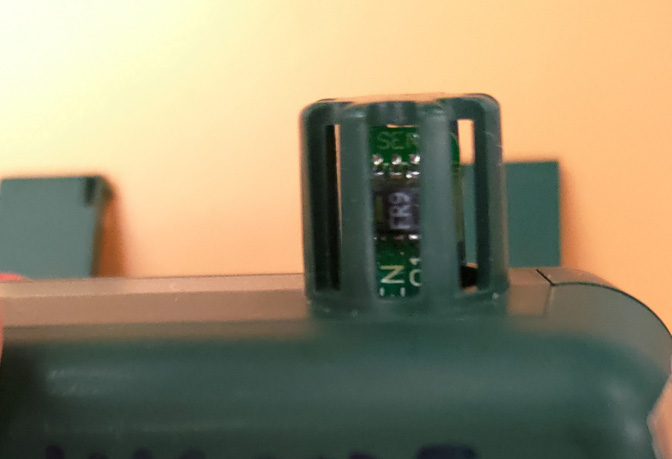 (b) 电容式感应器的集成电路
(b) 电容式感应器的集成电路
5.3. 机械湿度计
机械湿度计是最早使用的湿度计。它量度物料在不同湿度下的膨胀和收缩程度来测量空气中的湿度。感测物料有人类的毛发、牛肠、纺织品或塑胶。如图8所示,物料的尺度变化会以机械装置(例如杠杆)放大至一支指针上显示,并在移动图表上作出记录。机械湿度计的测量不确定度一般约为5 %RH至15 %RH。机械湿度计一般在室温下使用,它的反应时间缓慢,而迟滞误差的问题亦更为明显。
 (a) 机械湿度计
(a) 机械湿度计
 (b) 感测元件
(b) 感测元件
Reference:
- BS 1339-3:2004 Humidity. Part 3 - Guide to the measurement of humidity
- Handbook of temperature measurement, Robin E. Bentley
振动
智能电话精于侦测动态的玄机

区志豪, 林凯珊
声学、超声及振动实验所
标准及校正实验所
今时今日的智能电话设计精密,配备各式各样的传感器,例如加速度计、陀螺仪、磁强计、光照度计和轻触式萤幕,能够完成很多出色的工程任务。这些细小的机器能够追踪用家举动、监测心跳和预测我们的需要,其中两款最常用于智能电话的传感器是加速度计和陀螺仪。
加速度计用于侦测电话的画面方向,电话会因应摆放的角度从而转换萤幕显示的画面方向,由直向转为横向,或由横向转为直向,为用家提供舒适的观赏体验。举例来说,利用手提电话观看YouTube影片的最佳模式是把电话水平放置,用家以横向模式播放影片,影像不但能填满整个画面,而且更大更清晰。此外,加速度计亦可用作计步器,计算用家行走的步数。多种健康与健身和运动应用程式都会透过分析计步器计算的步数,判断有关动作的频率、强度、持续时间和模式,从而估算用家在运动期间消耗的卡路里,帮助他们记录自己的运动常规以达到个人目标。一些较高端的电话会采用基于感应动作的姿势识别演算法来分析三轴加速度计的输出数据,以提升用家的流动应用程式和游戏体验。
不过,由于加速度计只能量度线性加速,它只可量度设备移动的方向;除非该加速度计同时配备陀螺仪或陀螺仪传感器,否则便不能处理设备在移动期间向左右两侧倾斜的位置。陀螺仪是另一种用于智能电话的方向传感器,用作量度角旋转速率。陀螺仪通常会为加速度计收集的资料提供额外的维度,使加速度计能够更准确地判断电话的方向和移动情况。Google Sky Map和Pokemon Go等受欢迎的应用程式均使用陀螺仪数据来改善测量的准确度。
如今,最先进的九轴设备会将三轴陀螺仪、三轴加速度计和三轴指南针结合在同一块晶片上,并加入数位运动处理器,用以实现各种复杂的移动演算法。
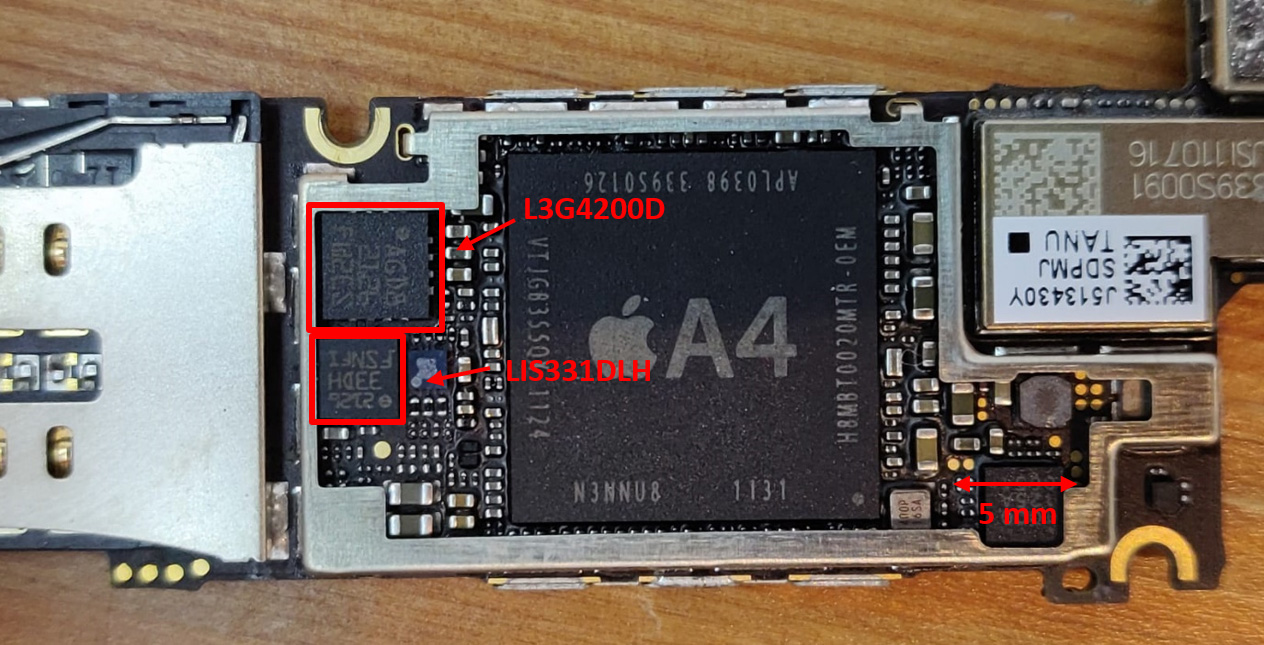 图1 iPhone 4内的意法半导体LIS331DLH加速度计和L3G4200D陀螺仪
图1 iPhone 4内的意法半导体LIS331DLH加速度计和L3G4200D陀螺仪
加速度计的结构
加速度计通常装有电子电路,利用电效应、压电效应、压阻效应或电容效应,探测装置的轻微动作。现今用于智能电话的加速度计属于微机电系统,采用微电子装配技术装配于硅基板上,成品体积极细。应用微机电系统的加速度计装有一个微型的感震质量,连接于局限在固定金属板之间循单一方向移动的弹簧系统。当该特定方向出现加速情况时,感震质量便会移动,而其与金属板之间的电容亦会出现相应变化。电容变化与加速水平成正比,量度电容变化便可判断装置的移动情况。
 图2 微机电系统加速度计内含感震质量的电路
图2 微机电系统加速度计内含感震质量的电路
陀螺仪的构造
陀螺仪或陀螺仪传感器是根据角动量守恒定律设计而成,用于量度或维持方向和角速。传统的陀螺仪由转轮或转盘等转子和外框组成,即使外框的转动方向有变,转子亦会维持旋转轴的方向不变。
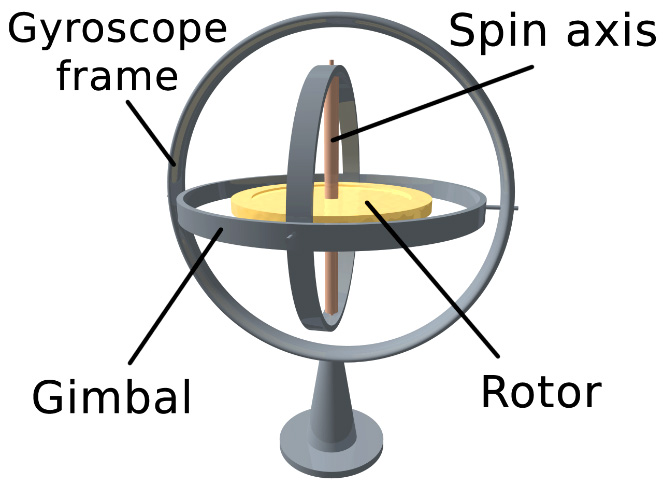
陀螺仪框架旋转轴
平衡环架转子
 图4 传统陀螺仪的运转动画(资料来源︰维基百科)
图4 传统陀螺仪的运转动画(资料来源︰维基百科)
不过,用于智能电话的微机电系统陀螺仪,则是根据另一项名为「科里奥利效应」(科氏效应)的运作原理设计而成。下图解释科氏效应的原理︰当某平台正在转动,站在中心点附近的人向接近边界的定点移动,其相对地面的切线速度便会如图中的箭嘴长度所示而有所增加。因径向速度改变导致切线速度出现的变化称为「科氏加速」,量度科氏加速便可判断角速。
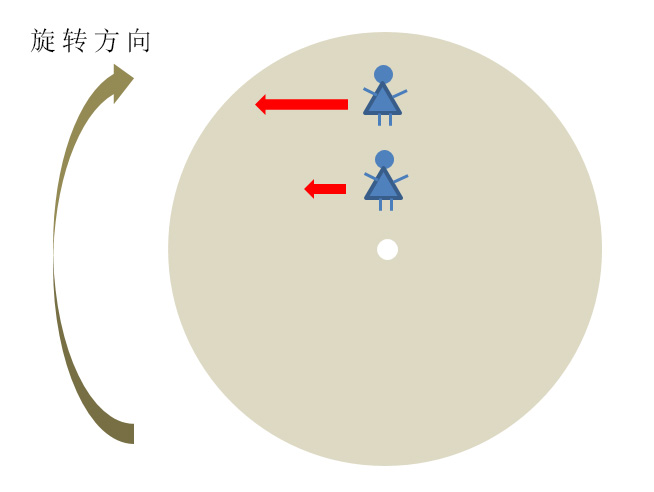 图5 科氏效应概念图
图5 科氏效应概念图
同样地,当质量以特定速度向特定方向移动,由于科氏效应的影响,移动时外部角速率会令质量出现垂直位移。正如微机电系统加速度计一样,位移亦会改变电容,量度电容变化便可判断相应的角速率。
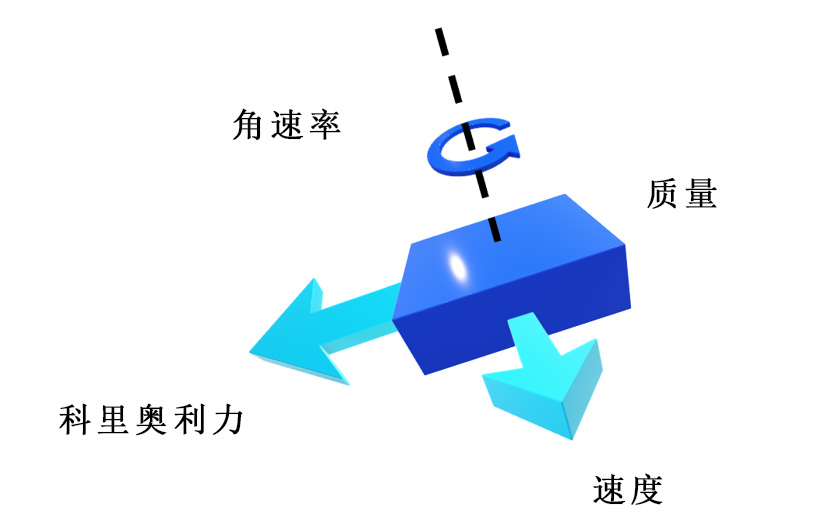 图6 科里奥利效应的运动向量
图6 科里奥利效应的运动向量
校正加速度计
一般方法
压电加速度计一般是根据国际标准ISO 16063-21的背对背比较法进行校正。这个方法的基本原理是将接受测试的传感器安装在标准加速度计上,然后让两者同时达至相同的加速度。该传感器的灵敏度可从两者的电输出信号之间的比率数值与标准加速度计的灵敏度得出。这个方法简单易用,因而广泛应用于常规的校正或性能检查工作。
原级方法
参考标准加速度计或高精准度的工作级别加速度计,必须以原级方法进行校正。国际标准ISO 16063-11阐述了加速度计的各种原级校正方法。
方法一(条纹计数法)用于校正在1 Hz至800 Hz频率范围内的灵敏度幅值;方法二(极小点法)用于校正在800 Hz至10 kHz频率范围内的灵敏度幅值;方法三(正弦逼近法)用于校正在1 Hz至10 kHz频率范围内的幅值和相位灵敏度。
由于方法三涵盖较广的频率和振幅范围,亦能测量振动信号的振幅和相移,因此被广泛应用于加速度计的原级校正。
标准及校正实验所的原级振动测量系统
下图为标准及校正实验所的振动测量系统的主要仪器。该系统利用电动激振器产生动量。接受校正的加速度计安装在激振器上,而激光振动计则安装于振动隔离地基顶部,并以激光光束对准加速度计周围的位置。该系统以激光干涉法的原理为基础,采用波长为633纳米的红色氦氖激光。干涉仪的正交输出信号及压电加速度计经滤波和放大的电信号,会被数位示波器同时取样,然后透过采用正弦逼近法的软件处理相关的数码资料,以计算出加速度计的复数灵敏度。
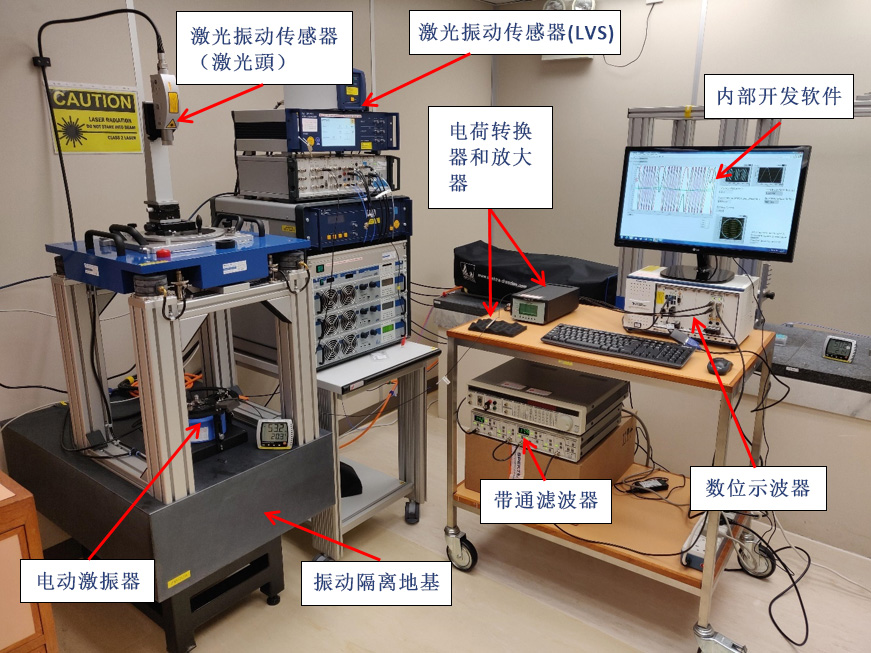 图7 标准及校正实验所的振动测量系统
图7 标准及校正实验所的振动测量系统
利用激光干涉仪进行原级振动校正的操作原理
根据国际标准ISO 16063-11所载的方法三,可利用光学干涉法把机械位移、速度和加速度溯源至激光的波长。图8是使用零差技术的改良版迈克生干涉仪的光学原理图,所用激光是波长为633纳米的稳频氦氖红光。
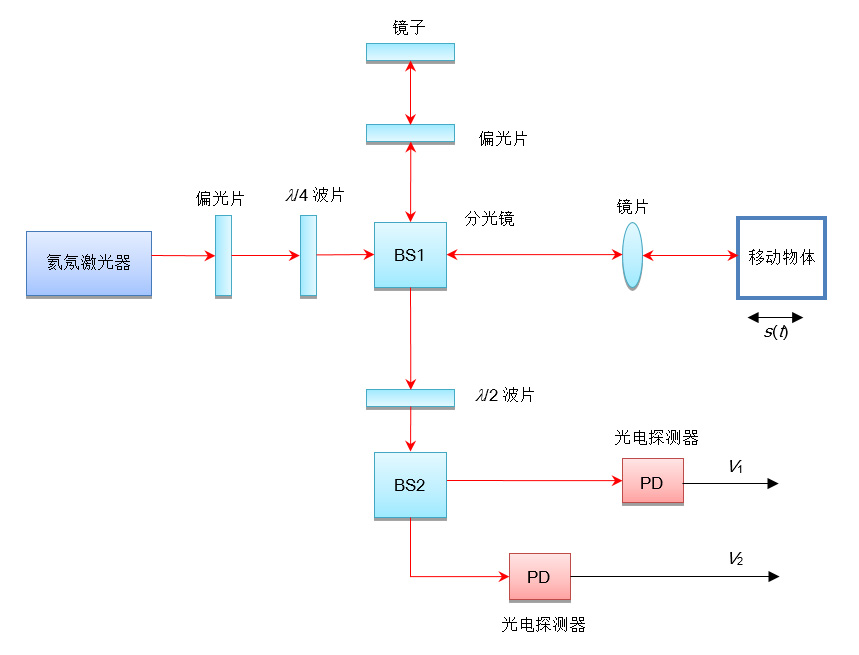 图8 改良版迈克生干涉仪的原理图
图8 改良版迈克生干涉仪的原理图
经偏振的激光光束通过λ/4波片后,变成圆形偏振光。非偏振分光镜(BS1)把该入射光束分成两道强度相等的正交光束。参照光束经偏振后射向一面固定的镜子。圆形偏振的测量光束从一个移动物体的表面反射并回到BS1。参照光束和测量光束通过λ/2波片,该波片作调整后可令偏振分光镜(BS2)产生光干涉,从而形成两道分别对应于同相(I)和正交(Q)分量的两个光束。光电探测器(V1)和(V2)的输出电压, 代表I和Q的数值. 按照下一节的计算方法, 可准确算出移动物体的位置. 加上采样的时间, 就可算出移动物体的速度及加速度。
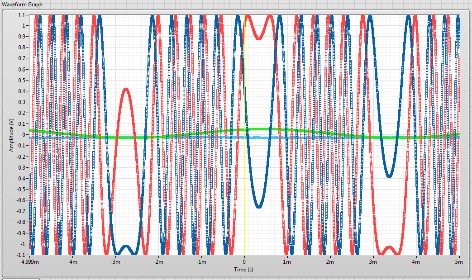 图9 光电探测器(V1)和(V2)的输出电压
图9 光电探测器(V1)和(V2)的输出电压
正弦逼近法的计算方法
此一节比较适合对数学有兴趣的读者。
光电探测器(V1)和(V2)的输出电压, 在去除直流分量后, 会按下列方程式,随两道光束之间的调制相位差ϕmod而变化。
 (1)
(1)
 (2)
(2)
测量光束是从移动物体散射回来的,参照光束和测量光束之间的光程差L(t)是时间的函数。设定s(t)为该移动物体的位移,而∅s为起始位移相位。
 (3)
(3)
光电探测器和加速度计的输出会同步取样。国际标准ISO 16063-11所界定的正弦逼近法,可用作于数值正反切解调。假设 ,并以特定算法将相位展开,以避免因正反切函数的含糊性而出现不连续性。
,并以特定算法将相位展开,以避免因正反切函数的含糊性而出现不连续性。
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
通过测量, 收集了n个不同调制相位差的数据。通过使用最小平方法求解n个方程,可以估算出A,B和C三个未知参数的数值。
以矩阵形式表示:
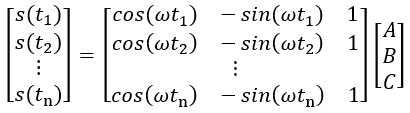 (8)
(8)
 (9)
(9)
设定ϵ为误差向量
 (10)
(10)
ϵϵT为平方误差
 (11)
(11)
为了把平方误差减至最小,设定有关β的期望值导数为零,即 。
。
 (12)
(12)
 (13)
(13)
 (14)
(14)
β是 的最佳估计值。
的最佳估计值。
调制位移幅度为
 (15)
(15)
起始位移相位为
 (16)
(16)
假设正弦振动频率为ƒ、加速度值为a,而起始加速相位为∅a
 (17)
(17)
 (18)
(18)
从加速度计同时取样的一连串输出数值u(ti),亦可运用正弦逼近法以同样方式得出其约数
 (19)
(19)
 (20)
(20)
加速度计的输出振幅为
 (21)
(21)
加速度计的起始输出相位为
 (22)
(22)
复数灵敏度的模数为Sa,而加速度计的相移为Δ∅
 (23)
(23)
 (24)
(24)
图10显示了计算的不同阶段的数据。
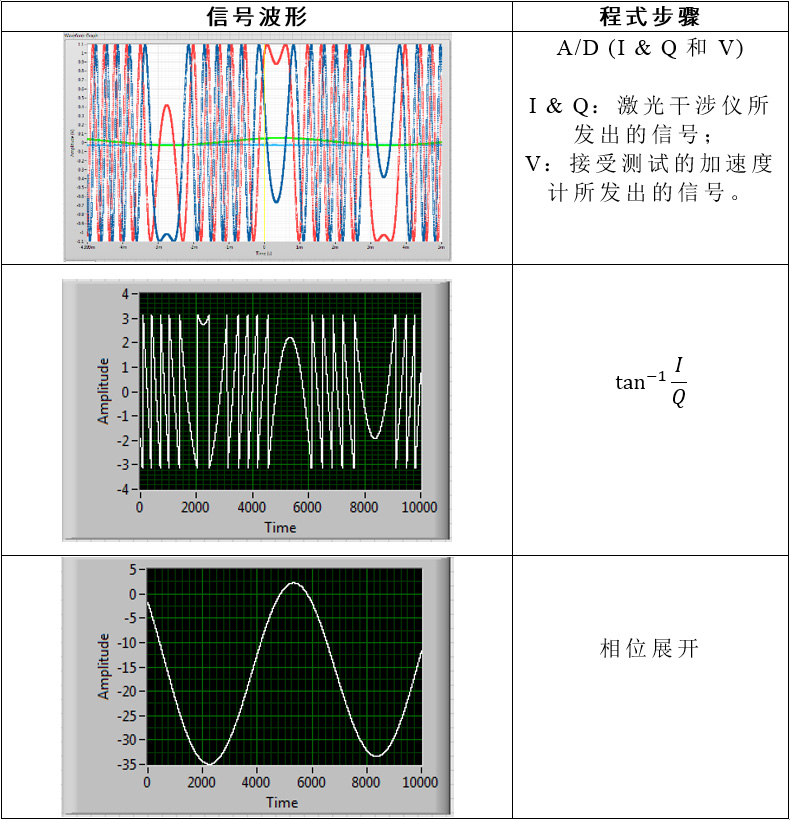 图10 计算的不同阶段的数据。
图10 计算的不同阶段的数据。
参考资料:
[1] ISO 16063-11:1999, “Methods for the calibration of vibration and shock transducers - Part 11: Primary vibration calibration by laser interferometry”
[2] ISO 16063-41:2011 “Methods for the calibration of vibration and shock transducers Part 41: Calibration of laser vibrometers”
[3] Primary vibration calibration with CS18P using laser vibrometer technology Holger Nicklich, Ume Buehn, SPEKTRA GmbH Dresden, Germany
[4] Realization and Results of a DKD Interlaboratory Comparison Regarding the Measurand Acceleration Dr. Thomas Bruns, Philipp Begoff, Michael Mende XX IMEKO World Congress Metrology for Green Growth September 9-14, 2012, Busan, Republic of Korea
[5] https://www.memsjournal.com/2010/12/motion-sensing-in-the-iphone-4-mems-accelerometer.html
[6] https://www.polytec.com/us/vibrometry/technology/
[7] HowToMechatronics.com